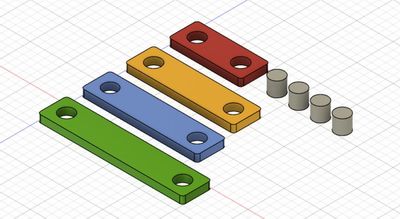
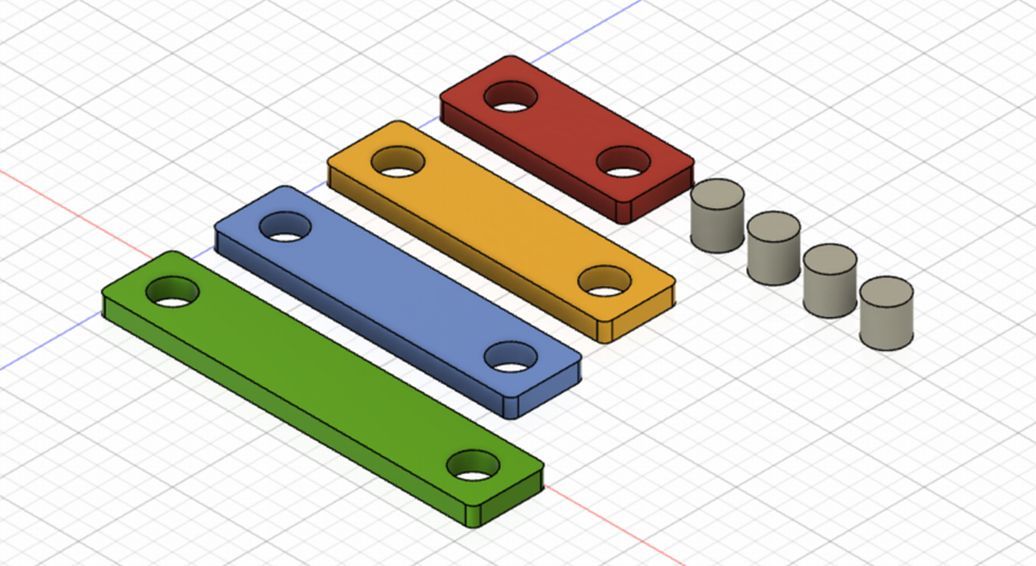
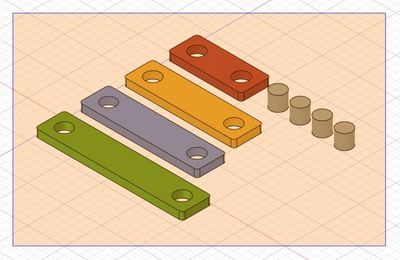
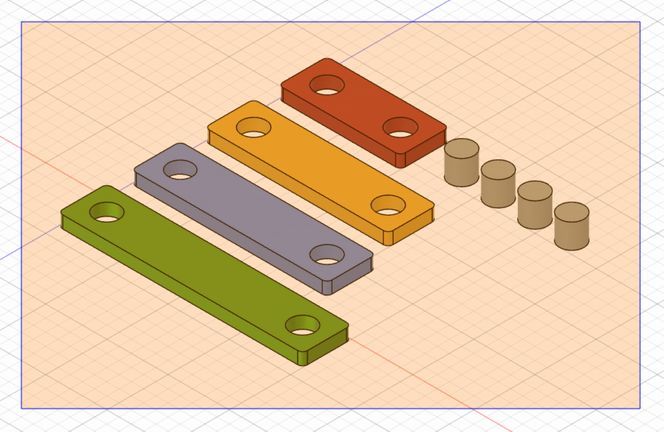
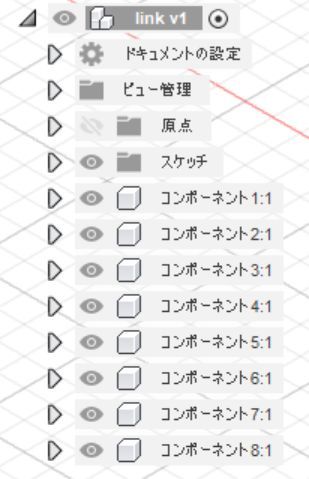
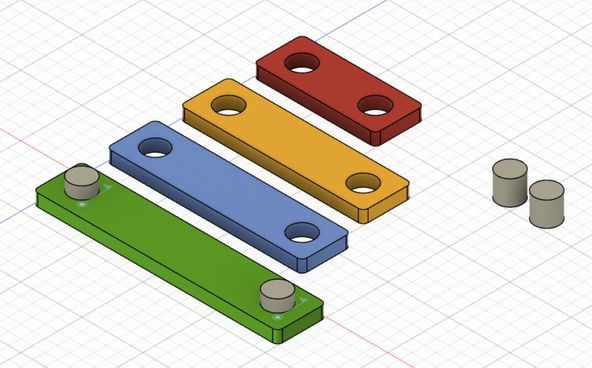
使用する8個の部品作成0 リンク棒の接点間の距離を30、55、60、80mmとします。 端部までの距離はさらに左右10mm足されるので、50、75、80、100mmとなります。また、接点の直径は10mm、リンク棒の厚みは5mmとします。 完成すると左側の画面にボディ1~ボディ8までが表示されます。 Add Annotation Order
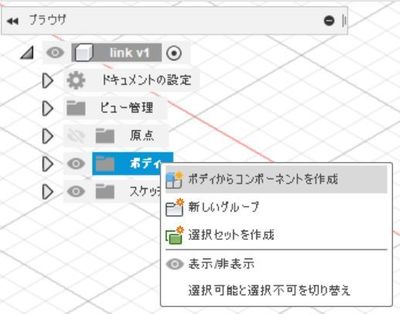
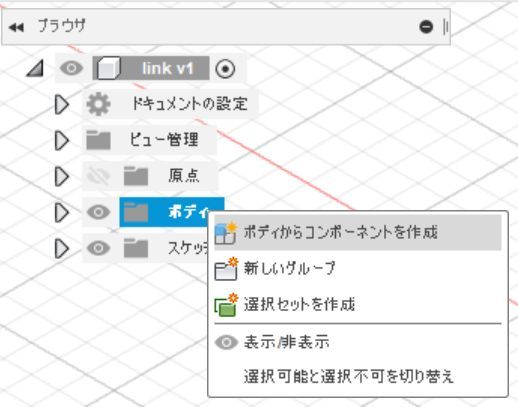
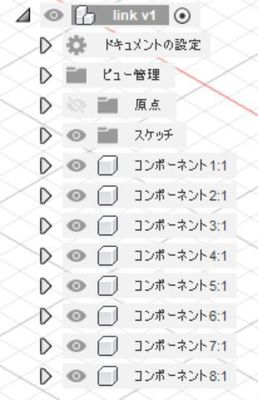
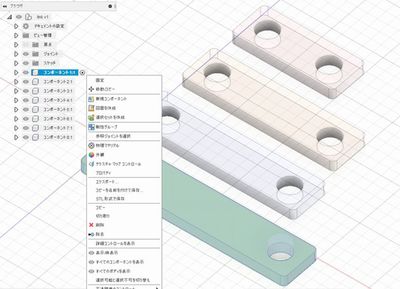
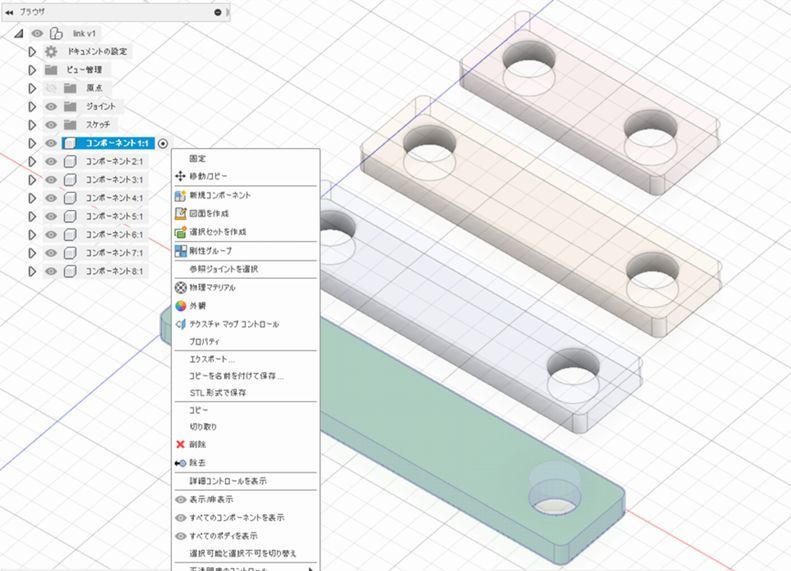
各部品のコンポーネント化0次に使用する部品すべてを右クリックで囲むと色がつきます。コンポーネント化の画面10左側のボディを右クリックして「ボディからコンポーネントの作成」をクリックすると、それぞれのボディに対応した8つのコンポーネントができます。コンポーネント化の画面20このコンポーネント化の作業は複数の部品を組み合わせて作業をする前段階として必ず行います。Add Annotation Order
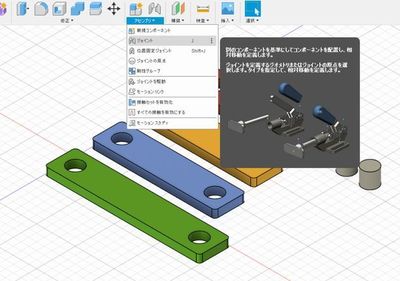
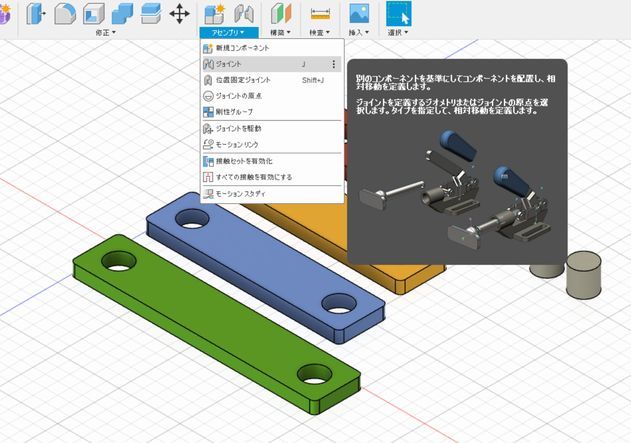
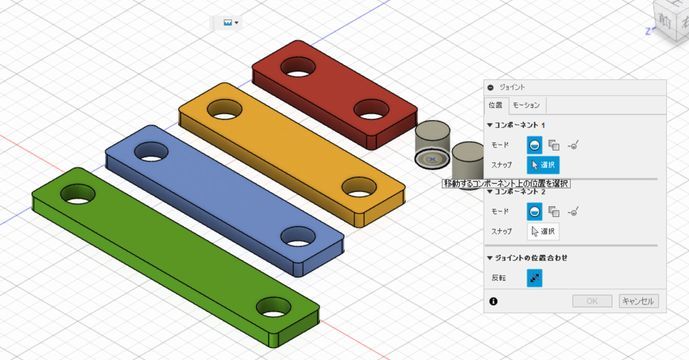
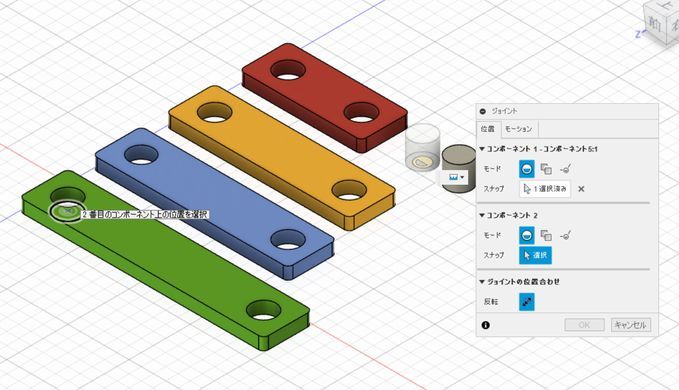
アセンブリ→ジョイントで組み立て0アセンブリ→ジョイントのコマンド操作で組み立てていきます。移動するコンポーネント上の位置を選択0ここではまず緑のリンク棒に回転軸の円筒を移動させます。移動させるときには、移動したい部品のコンポーネントを先にチェックします。ここでは1個の円筒形の軸部品の下部の円を指定します。少しずれると円ではなく円筒部を指定してしまうので注意してください。移動先のコンポーネント2の位置を指定0コンポーネント2は緑のリンク棒の左側の穴の下部の円を指定します。回転を指定0ジョイントの吹き出し画面の「位置」で2つのコンポーネントを指定できたら、隣の「モーション」をクリックして「回転」を指定します。そうするとZ軸周りに回転します。他の軸周りで回転させたいときにはここをX軸やY軸にします。おそらく何もしないと「回転」の箇所は、隣の「剛性」になっており、このままだと緑のリンク棒と円柱形の軸が固定してしまい、その場での回転をしないことになるので注意しましょう。その隣の「スライダ」は直線的な運動を作成するときに使います。回転ジョイントが完成0ここで吹き出し画面の下部にある「OK」をクリックすると、コンポーネント1の円筒部品がコンポーネント2の緑のリンク棒のところへ移動して、全体がブルブルと震えた後に結合して、回転ジョイントが完成します。2つ目の回転ジョイント作成0同様の操作で緑のリンク棒のもう一方に2つ目の回転ジョイントを作成します。緑のリンク棒の固定0てこクランク機構は1つのリンクは固定しておく必要があるので、ここでは緑のリンク棒を固定します。緑のリンク棒をどこかをクリックすると左側のコンポーネント1の下部のアンダーラインが表示されるので、これに対応していることがわかります。そして、コンポーネント1の表示の脇にマウスを移動すると〇が表示されて、「コンポーネントのアクティブ化」と表示されるので、ここをクリックすると、縦にたくさんのコマンドが表示されます。その一番上の「固定」があるので、ここをクリックすることで緑のリンク棒が固定されます。ここでは他の3本のリンク棒は固定せずに動いてほしいので、今回「固定」のコマンドを使うのはここだけです。すべての回転ジョイントを完成させる0後は同じ作業なので詳細は省略しますが、図のようなてこクランク機構のモデルを完成させます。注意するのはリンク棒を重ねる順番です。これが間違っていると、回転を開始したときにリンク棒同士が鑑賞してしまいます。ここでは緑のリンク棒の上に赤と黄のリンク棒が配置されて、さらにその上に青のリンク棒が配置されています。今回、回転ジョイントに使用した4つの円筒部品はすべて同じ大きさでしたが、機構モデルによっては厚みが異なる場合もあります。ただし、余裕を持たせて長め回転ジョイントを用意しておくとその部分が突起となり、干渉することがあるので注意が必要です。Add Annotation Order
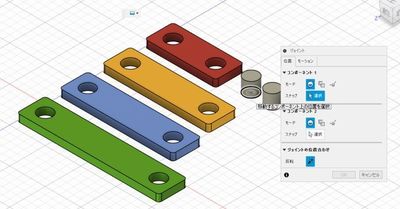
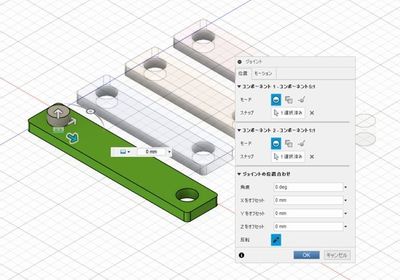
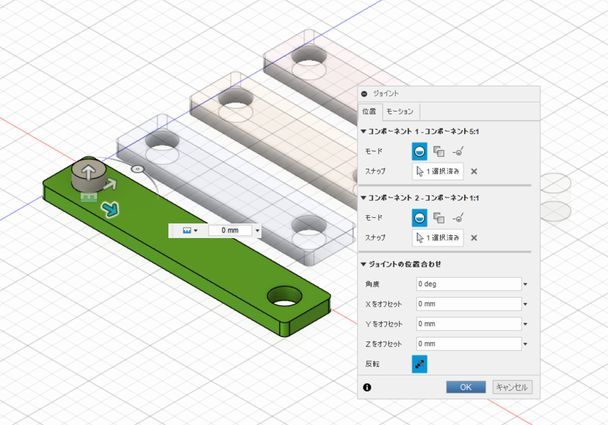
移動するコンポーネント上の位置を選択0ここではまず緑のリンク棒に回転軸の円筒を移動させます。移動させるときには、移動したい部品のコンポーネントを先にチェックします。ここでは1個の円筒形の軸部品の下部の円を指定します。少しずれると円ではなく円筒部を指定してしまうので注意してください。
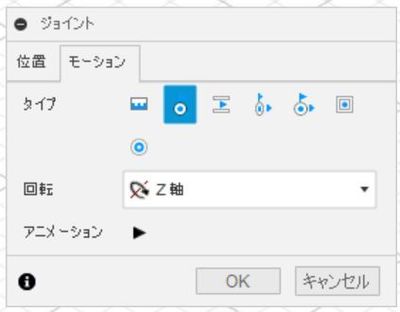
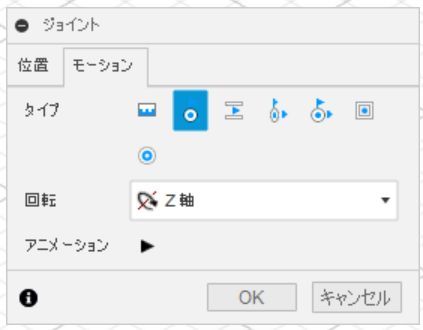
回転を指定0ジョイントの吹き出し画面の「位置」で2つのコンポーネントを指定できたら、隣の「モーション」をクリックして「回転」を指定します。そうするとZ軸周りに回転します。他の軸周りで回転させたいときにはここをX軸やY軸にします。おそらく何もしないと「回転」の箇所は、隣の「剛性」になっており、このままだと緑のリンク棒と円柱形の軸が固定してしまい、その場での回転をしないことになるので注意しましょう。その隣の「スライダ」は直線的な運動を作成するときに使います。
回転ジョイントが完成0ここで吹き出し画面の下部にある「OK」をクリックすると、コンポーネント1の円筒部品がコンポーネント2の緑のリンク棒のところへ移動して、全体がブルブルと震えた後に結合して、回転ジョイントが完成します。
緑のリンク棒の固定0てこクランク機構は1つのリンクは固定しておく必要があるので、ここでは緑のリンク棒を固定します。緑のリンク棒をどこかをクリックすると左側のコンポーネント1の下部のアンダーラインが表示されるので、これに対応していることがわかります。そして、コンポーネント1の表示の脇にマウスを移動すると〇が表示されて、「コンポーネントのアクティブ化」と表示されるので、ここをクリックすると、縦にたくさんのコマンドが表示されます。その一番上の「固定」があるので、ここをクリックすることで緑のリンク棒が固定されます。ここでは他の3本のリンク棒は固定せずに動いてほしいので、今回「固定」のコマンドを使うのはここだけです。
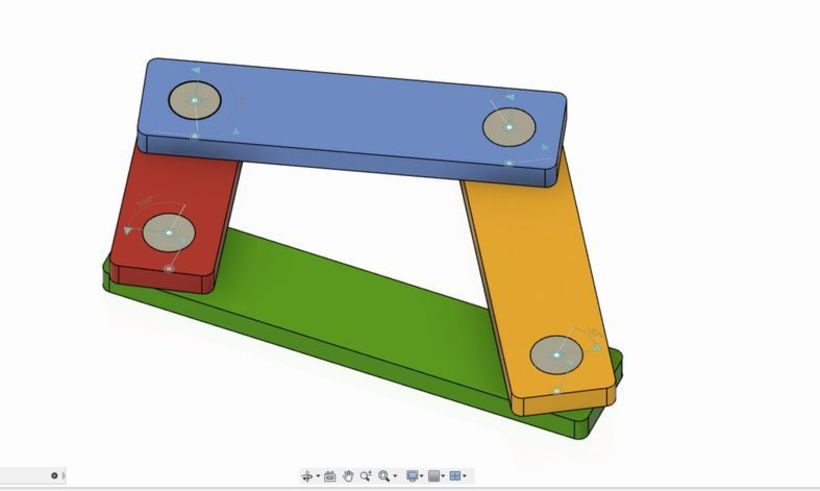
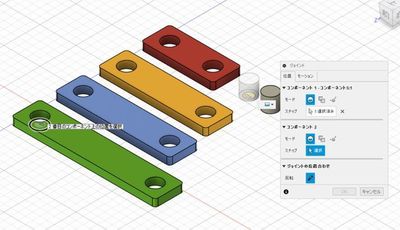
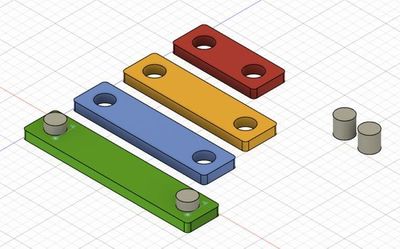
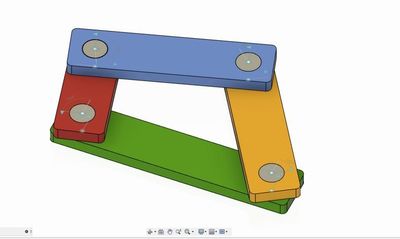
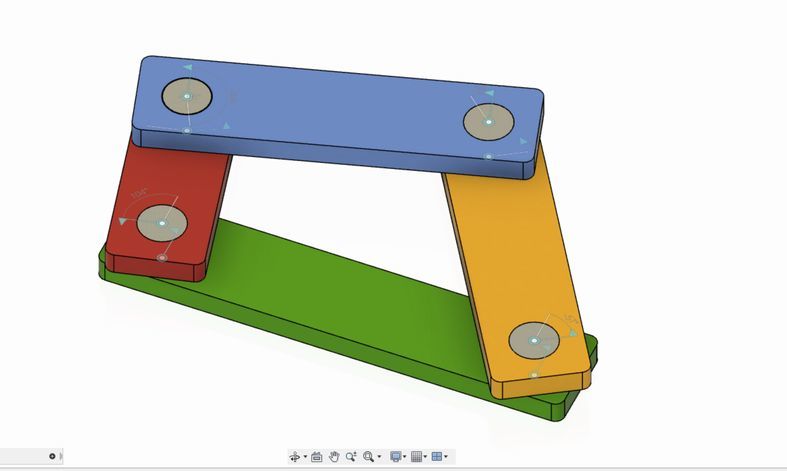
すべての回転ジョイントを完成させる0後は同じ作業なので詳細は省略しますが、図のようなてこクランク機構のモデルを完成させます。注意するのはリンク棒を重ねる順番です。これが間違っていると、回転を開始したときにリンク棒同士が鑑賞してしまいます。ここでは緑のリンク棒の上に赤と黄のリンク棒が配置されて、さらにその上に青のリンク棒が配置されています。今回、回転ジョイントに使用した4つの円筒部品はすべて同じ大きさでしたが、機構モデルによっては厚みが異なる場合もあります。ただし、余裕を持たせて長め回転ジョイントを用意しておくとその部分が突起となり、干渉することがあるので注意が必要です。
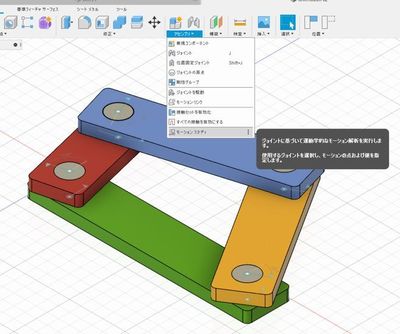
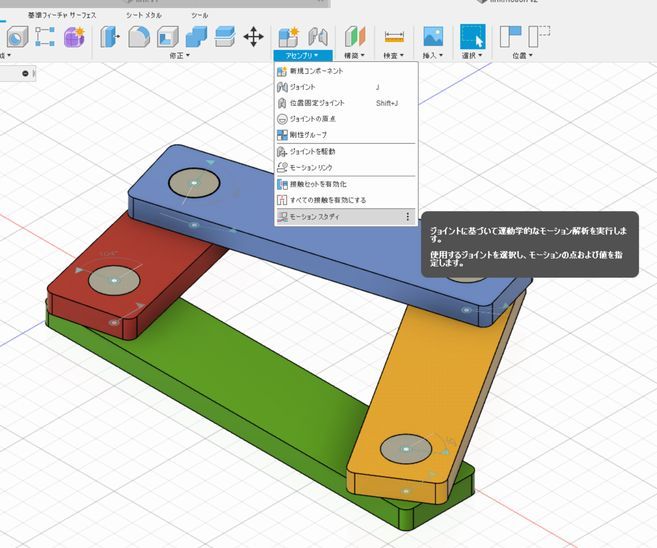
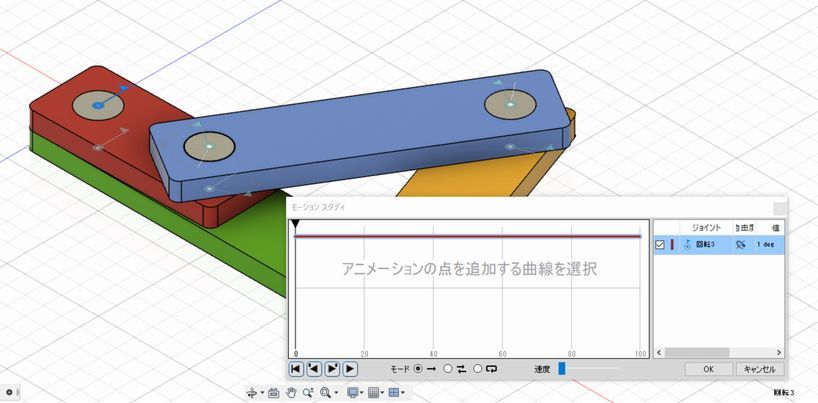
モーションスタディで動かしてみる0それではいよいよ動かしてみます。「アセンブリ」の一番下にある「モーションスタディ」をクリックすします。タイムライン表示でジョイントを指定0下部のタイムラインが表示されるので、ここのジョイントをクリックしてから、回転させたい緑と赤のリンク棒が重なった回転ジョイントを指定します。すること何らかの直線が表示されるはすです。このとき、どの角度からでも回転は開始できますが、この場合は緑と赤のリンク棒を重ねた位置が角度0となりわかりやすいので、そうしておきます。回転角度を指定する0ここからがややわかりにくいのですが、タイムラインの右端をダブルクリックすると角度の入力画面が表示されます。ここで例えば―360と入力してみましょう。マイナスをつけるとつけないでは回転の方向が変わります。ここではマイナスをつけると右下がりの直線となり、時計周りに回転します。回転を開始するには左下の▲をクリックします。「OK」を押すと消えてしまうので注意しましょう。また→記号を選択することで1回転だけか連続回転化などを選択できます。Add Annotation Order
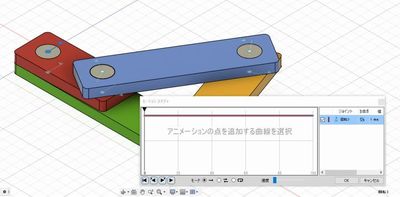
タイムライン表示でジョイントを指定0下部のタイムラインが表示されるので、ここのジョイントをクリックしてから、回転させたい緑と赤のリンク棒が重なった回転ジョイントを指定します。すること何らかの直線が表示されるはすです。このとき、どの角度からでも回転は開始できますが、この場合は緑と赤のリンク棒を重ねた位置が角度0となりわかりやすいので、そうしておきます。
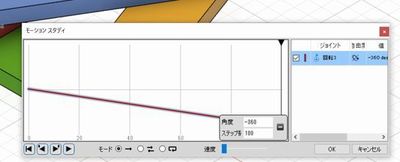
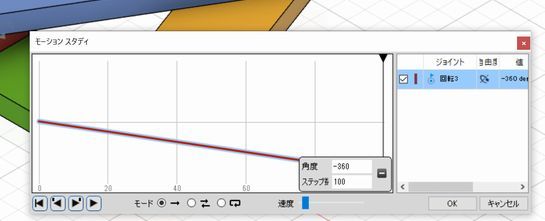
回転角度を指定する0ここからがややわかりにくいのですが、タイムラインの右端をダブルクリックすると角度の入力画面が表示されます。ここで例えば―360と入力してみましょう。マイナスをつけるとつけないでは回転の方向が変わります。ここではマイナスをつけると右下がりの直線となり、時計周りに回転します。回転を開始するには左下の▲をクリックします。「OK」を押すと消えてしまうので注意しましょう。また→記号を選択することで1回転だけか連続回転化などを選択できます。
動画画面の保存0動画画面の方法にはいろいろありますが、私は下記でも紹介しているShowmoreが使いやすいので、よく利用しています。https://fabble.cc/robotakun/linkagesimulatorAdd Annotation Order


Comments