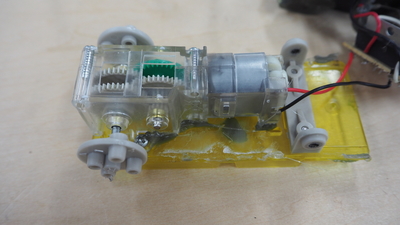
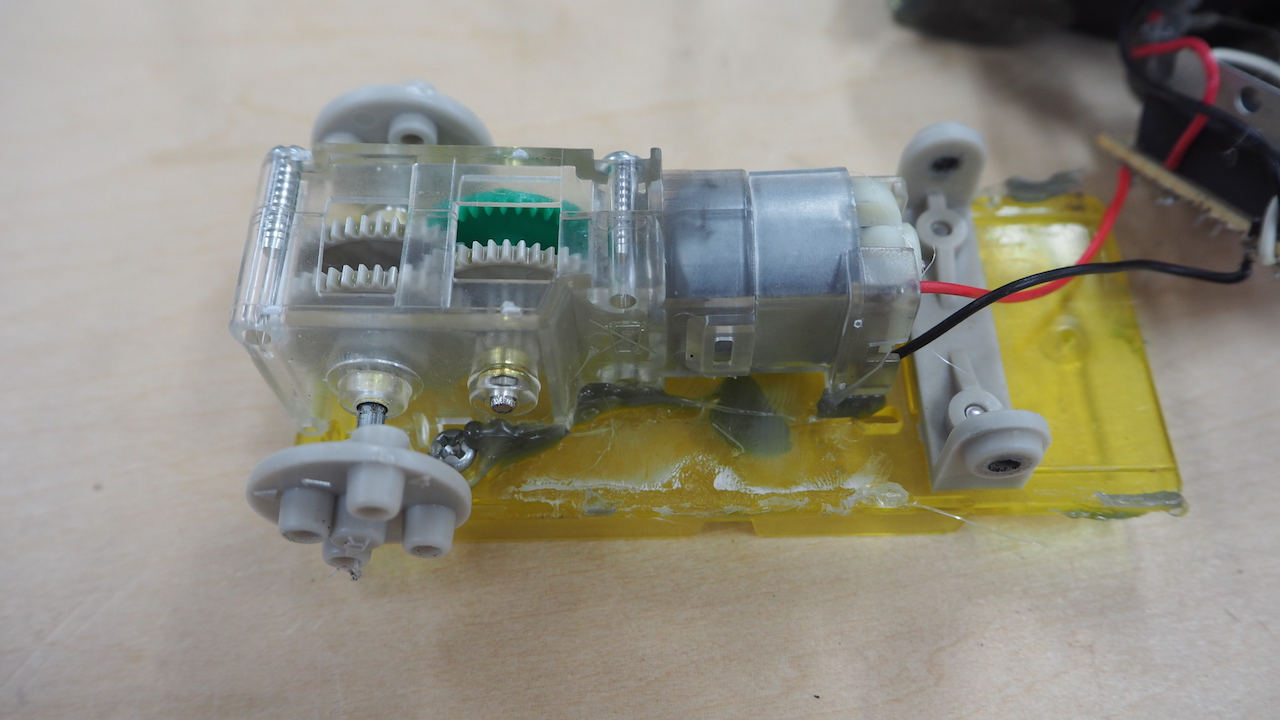
ギアボックスを組み立てる0タミヤ ロボクラフトシリーズ メカキリンを開封し、説明書③〜⑤、⑦に従ってギアボックスを組み立てる。このとき、逆転スイッチは使用しないので取り付けなくてよい。また電池ボックスは後でマイコンに接続するので、モータとは配線しない。※正常にギアが噛み合うか、電池をつなげて見て動作確認すると良い。必要ツール:ニッパー、カッターAdd Annotation Order
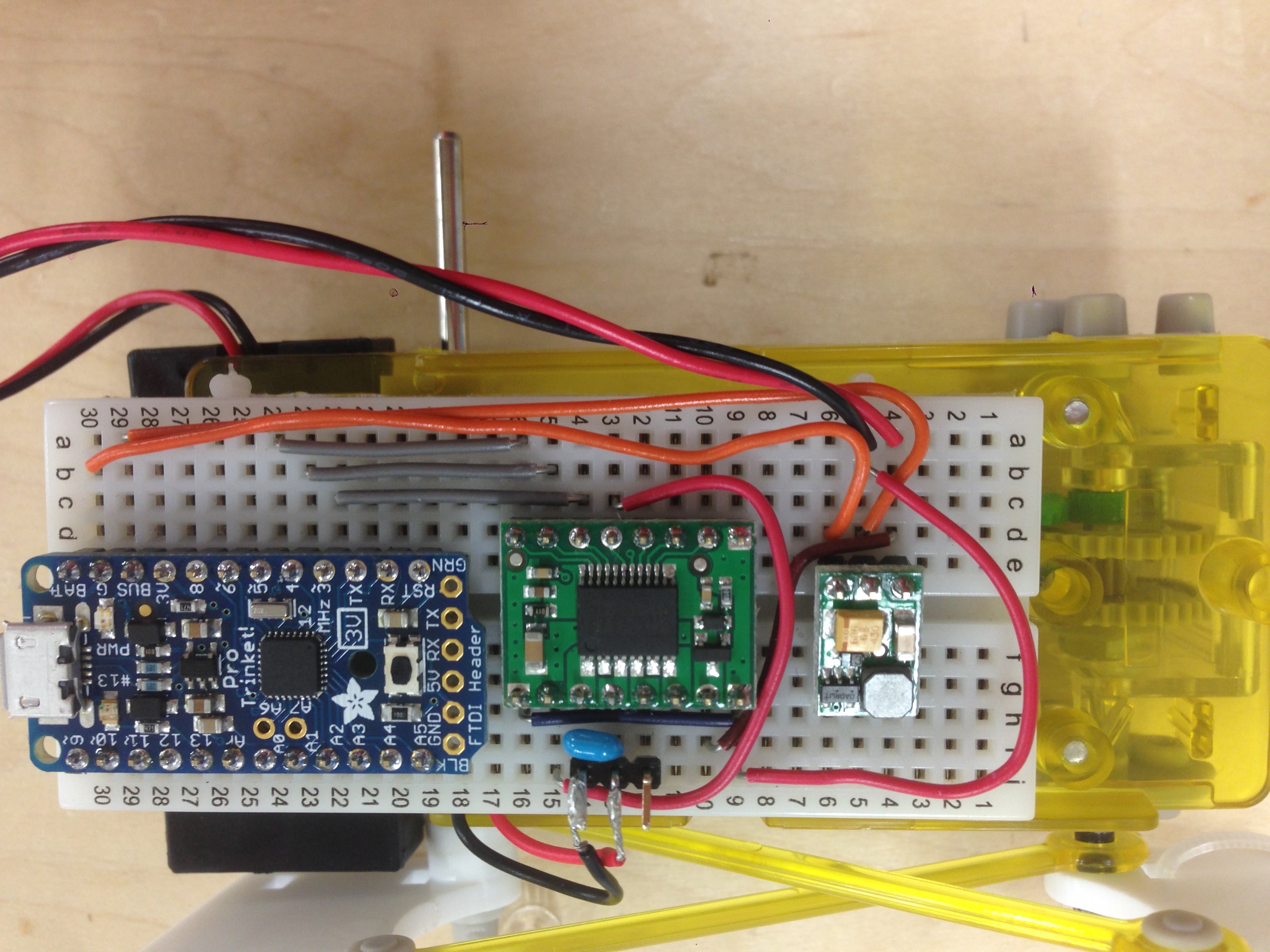
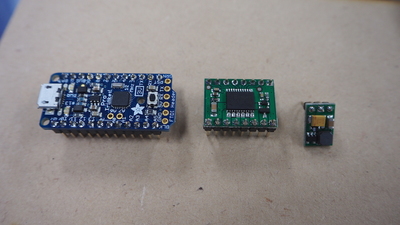
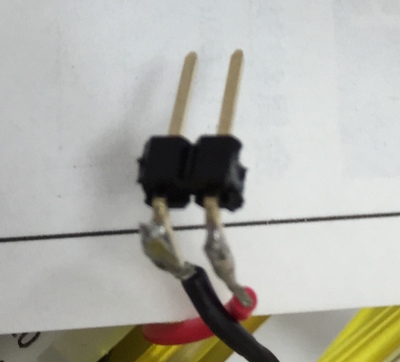
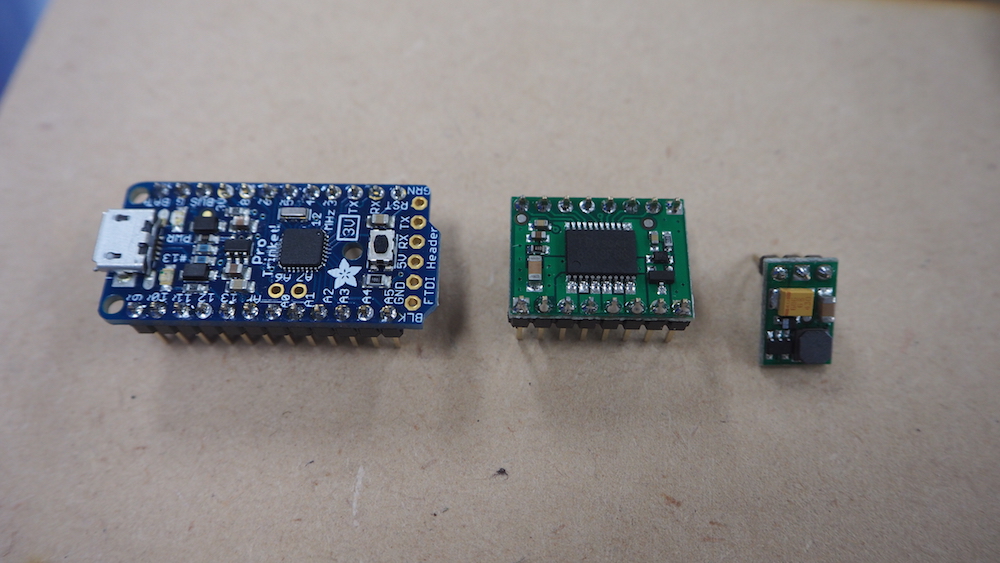
マイコン部分を組み立てる0ロボットの動きを制御するためのマイコン部分を作る。今回は以下の部品を使用する。Arduino Nanorduino NanoデュアルモータードライバTB6612FNG(連続最大1A)3.3V出力コイル一体型昇圧DCDCコンバータブレッドボードジャンパワイヤ電池ボックス 単4x2本用積層セラミックコンデンサー1μFピンヘッダ半田ごて部品のハンダ付け0モーダ―ドライバ、レギュレータにピンヘッダをハンダ付けする。モータと電池ボックスのワイヤの先も、ピンヘッダ2本を付けておくとブレッドボードに刺しやすいのでつけておく。部品の配置1それぞれの部品を、回路図を参考に部品を配置する。(※向きに注意。前工程の写真や部品裏のピン名称を参照)ブレッドボードは筺体のサイズに合わせるため、両端の二列は外しておく。モータはギアボックスに取り付けられているので、後で配線する。スケッチのアップロード0配置したら下記のスケッチプログラムをArduinoにアップロードする。書き込み方・ArduinoIDEをダウンロード,インストール Arduino IDE・IDEを開いたら、ツール->マイコンボードの中からArduino Nano w/Atmega328を選択・シリアルポートを選択 tty... かcu...スケッチプログラムスケッチプログラム0スケッチプログラムの中身1.前進/スピード1002.後進/スピード1003.前進/スピード2004以降**speed**と**n**に値を代入して後ろに追加していけば挙動を変更可能 analogWrite(5, **speed**); digitalWrite(2, LOW); digitalWrite(3, HIGH); delay(**n**);Add Annotation Order
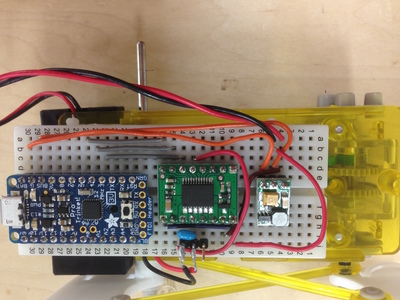
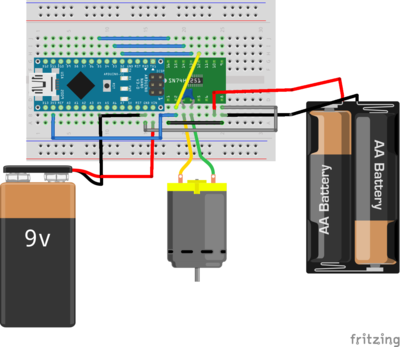
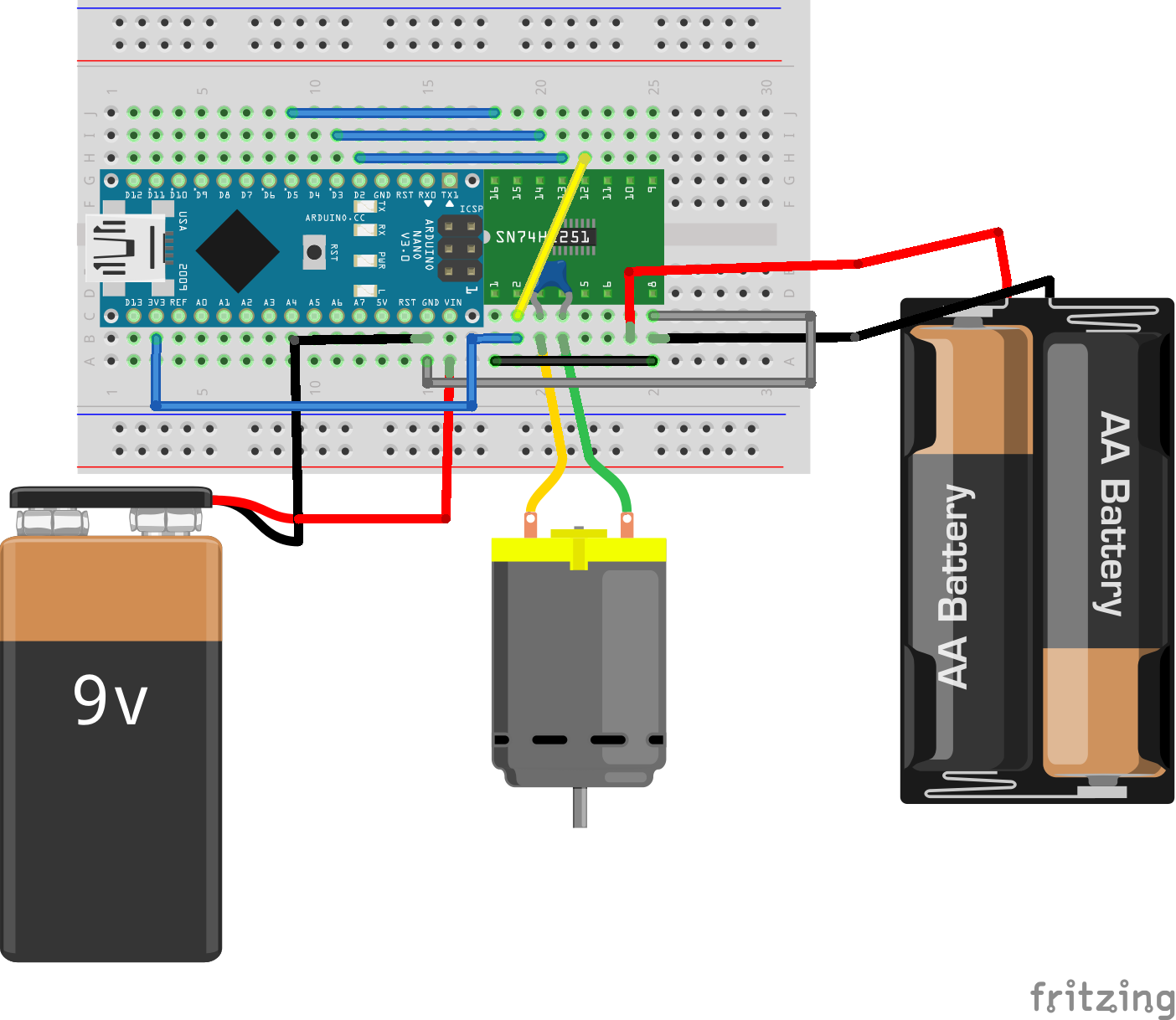
部品の配置1それぞれの部品を、回路図を参考に部品を配置する。(※向きに注意。前工程の写真や部品裏のピン名称を参照)ブレッドボードは筺体のサイズに合わせるため、両端の二列は外しておく。モータはギアボックスに取り付けられているので、後で配線する。
スケッチのアップロード0配置したら下記のスケッチプログラムをArduinoにアップロードする。書き込み方・ArduinoIDEをダウンロード,インストール Arduino IDE・IDEを開いたら、ツール->マイコンボードの中からArduino Nano w/Atmega328を選択・シリアルポートを選択 tty... かcu...スケッチプログラム
スケッチプログラム0スケッチプログラムの中身1.前進/スピード1002.後進/スピード1003.前進/スピード2004以降**speed**と**n**に値を代入して後ろに追加していけば挙動を変更可能 analogWrite(5, **speed**); digitalWrite(2, LOW); digitalWrite(3, HIGH); delay(**n**);
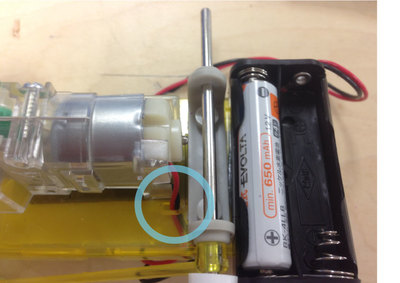
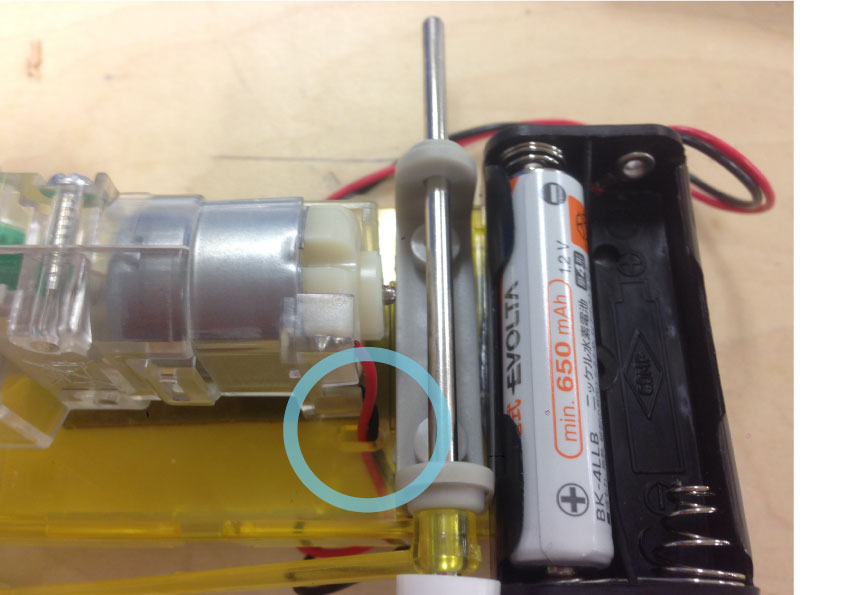
電池ボックスを配置する0電池ボックスをギアボックス横に両面テープで付ける。またモータの配線が短い場合は、写真の水色枠のように穴から通すと良い。ブレッドボードをギアボックスに付ける0クッションタイプの厚手の両面テープでブレッドボードをギアボックスの裏につける。※ネジ止めるところの出っ張りが接着の時に邪魔になるため、クッションタイプの両面テープを使ってとめる。出っ張りはニッパーで削ると止めやすい。Add Annotation Order
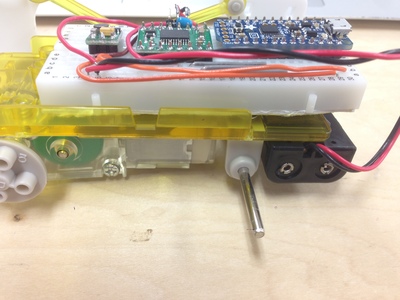
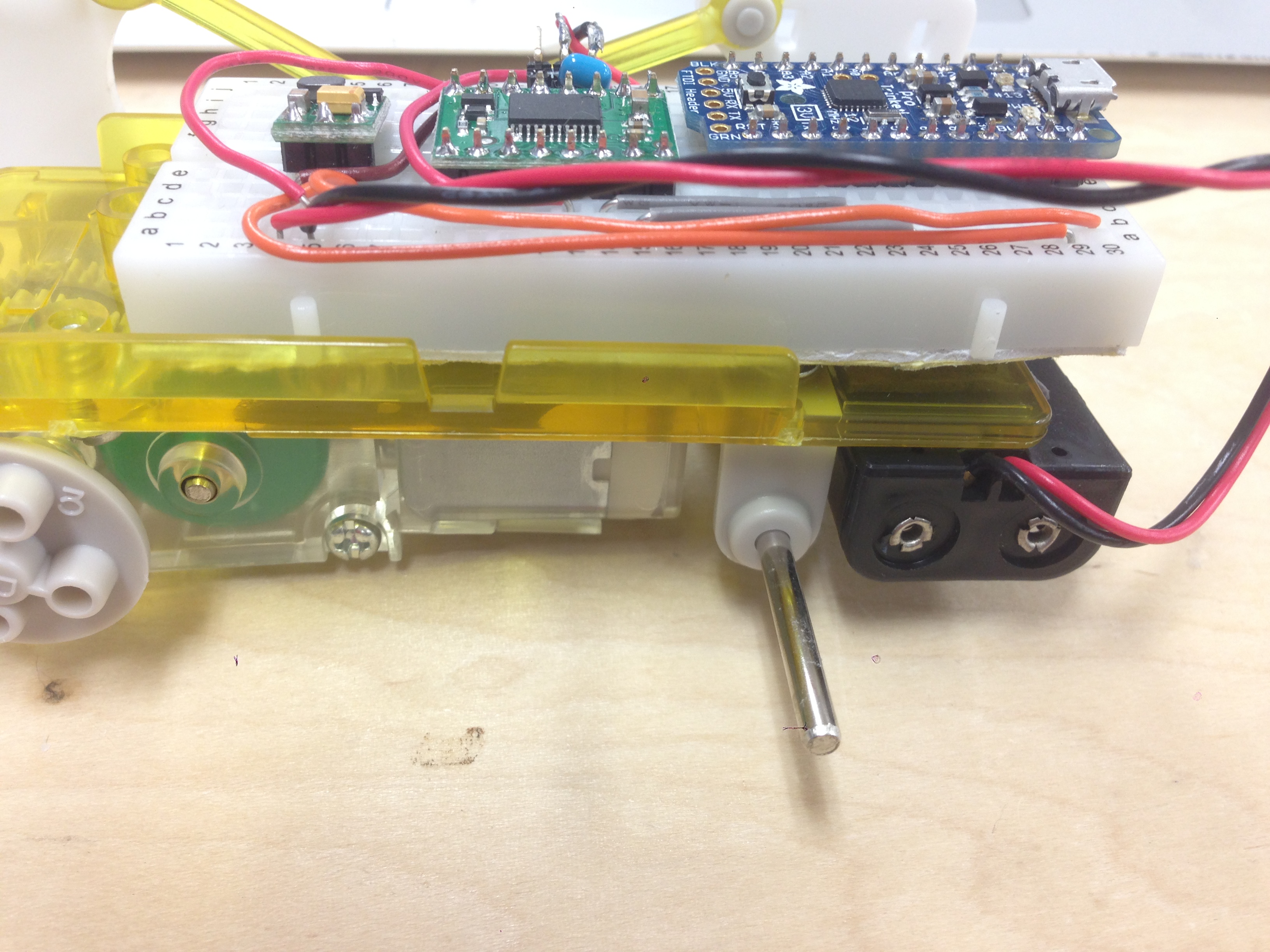
ブレッドボードをギアボックスに付ける0クッションタイプの厚手の両面テープでブレッドボードをギアボックスの裏につける。※ネジ止めるところの出っ張りが接着の時に邪魔になるため、クッションタイプの両面テープを使ってとめる。出っ張りはニッパーで削ると止めやすい。
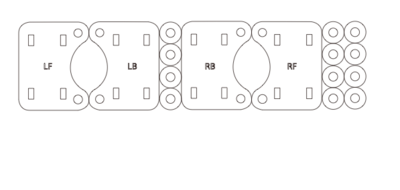
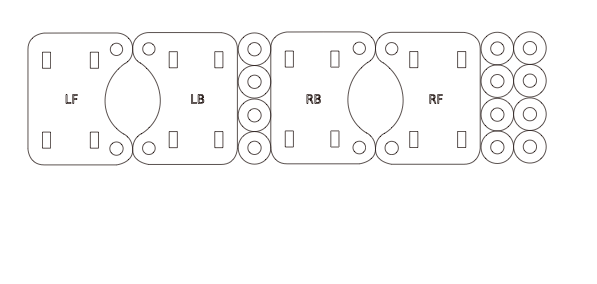
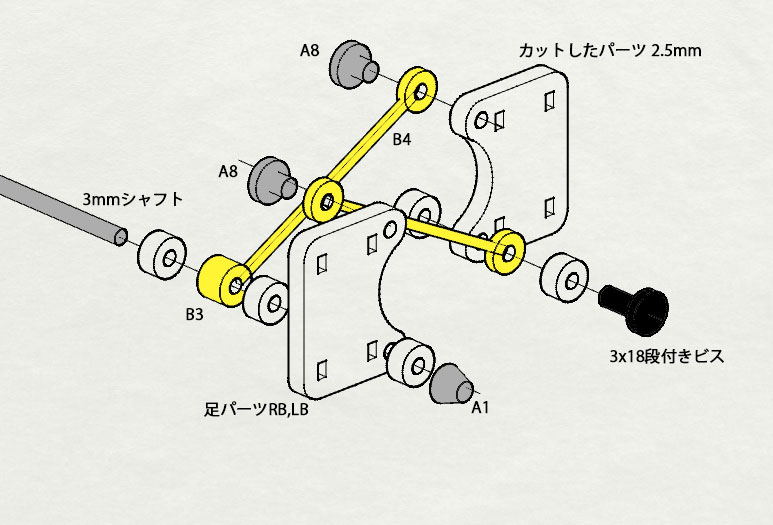
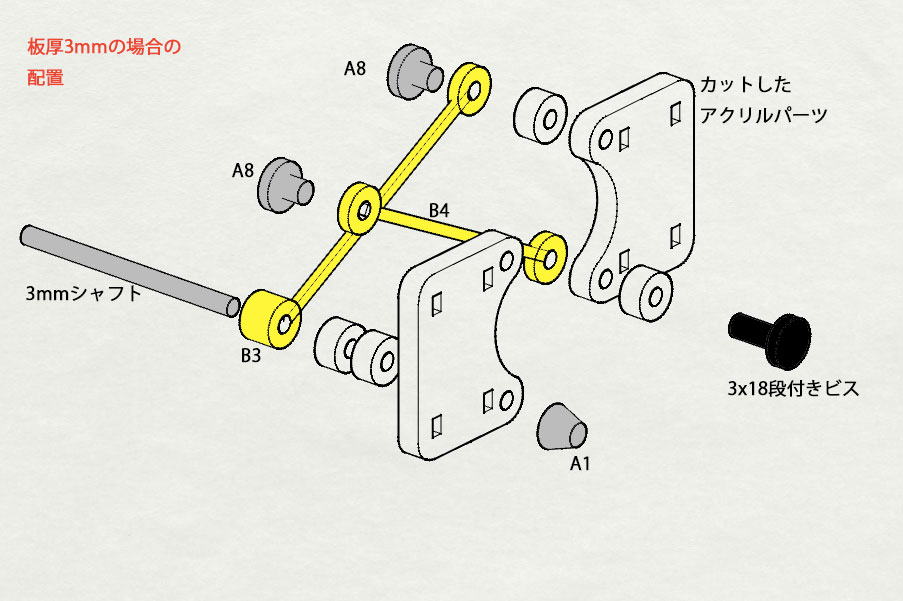
足部分をレーザーカッターで切り出す0Fabwalkerの足をレーザーカッターで切り出す。足AIファイル使用した板 (アクリルでもいいけど、MDFの方が落としても割れにくい)MDF 板厚2.5mm脚パーツをギアボックスに付ける0上図と、タミヤ メカキリンの説明書⑦〜⑨を参考にしながら、ギアボックスに、制作した足パーツとメカキリンのパーツを組み合わせて付ける。グレーのパーツ(A8など)と脚パーツの穴は丁度なので止めにくい場合があり、ペンチを使うと止めやすい。板厚3mmの場合はスペーサーの位置などが変わってくるので、念のため図を掲載してます。※順番や向きに注意!(A8パーツがきつすぎて入らない場合、M3のネジとナットを使うとよいです)動きを確認する0単4電池2本を電池ボックスに入れてみて、動きを確認する。このままでは歩くことはできない。※リチウムイオン充電池(eneloopとか)の方が電圧降下が無いので安定する。2本で3Vが望ましいAdd Annotation Order
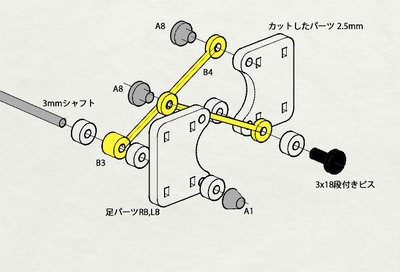
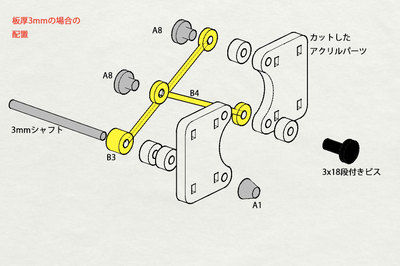
脚パーツをギアボックスに付ける0上図と、タミヤ メカキリンの説明書⑦〜⑨を参考にしながら、ギアボックスに、制作した足パーツとメカキリンのパーツを組み合わせて付ける。グレーのパーツ(A8など)と脚パーツの穴は丁度なので止めにくい場合があり、ペンチを使うと止めやすい。板厚3mmの場合はスペーサーの位置などが変わってくるので、念のため図を掲載してます。※順番や向きに注意!(A8パーツがきつすぎて入らない場合、M3のネジとナットを使うとよいです)
動きを確認する0単4電池2本を電池ボックスに入れてみて、動きを確認する。このままでは歩くことはできない。※リチウムイオン充電池(eneloopとか)の方が電圧降下が無いので安定する。2本で3Vが望ましい
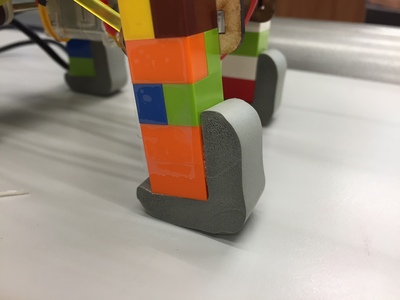
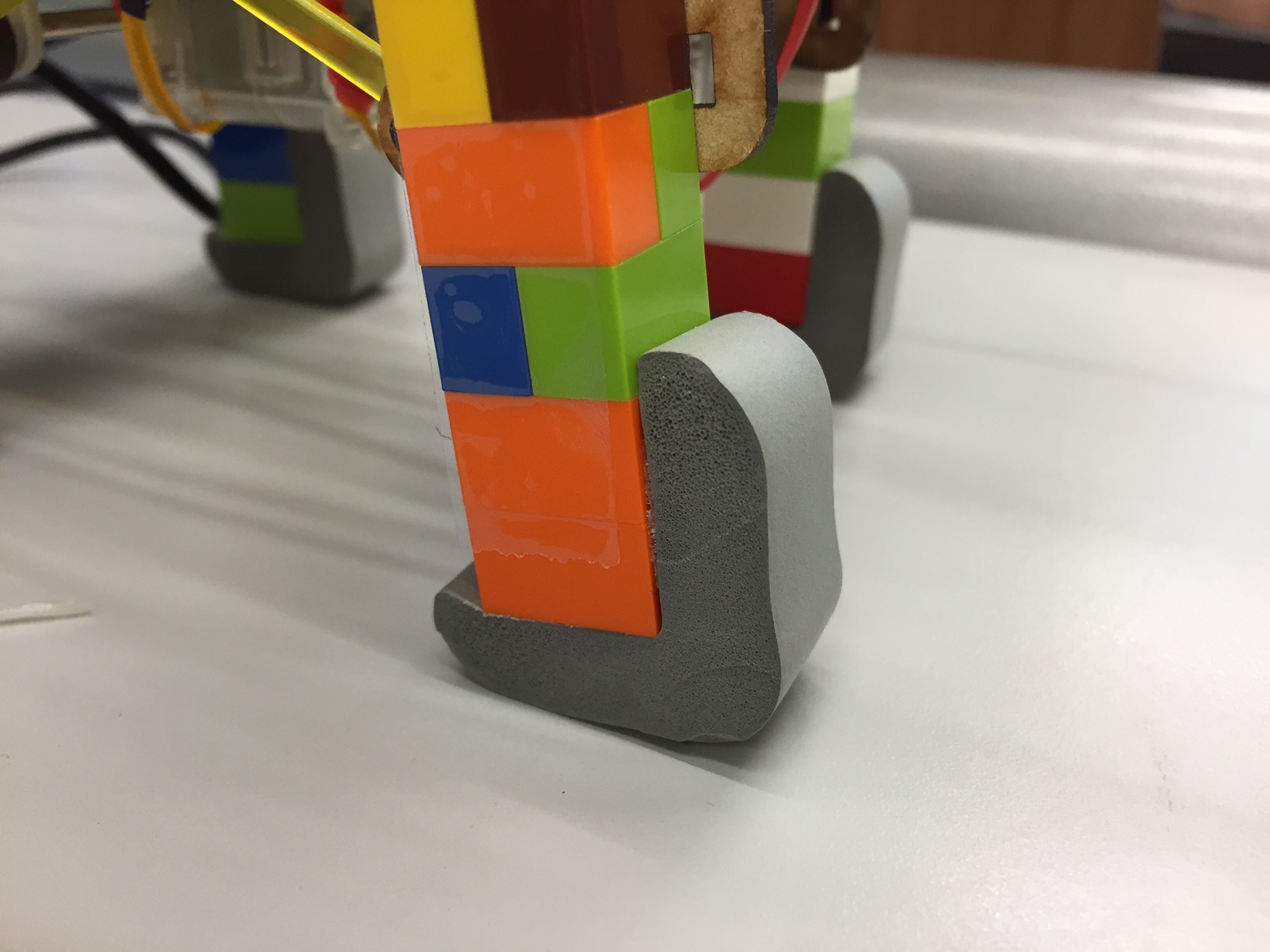
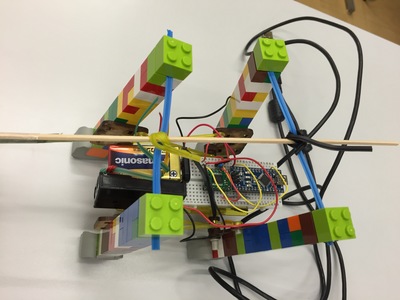
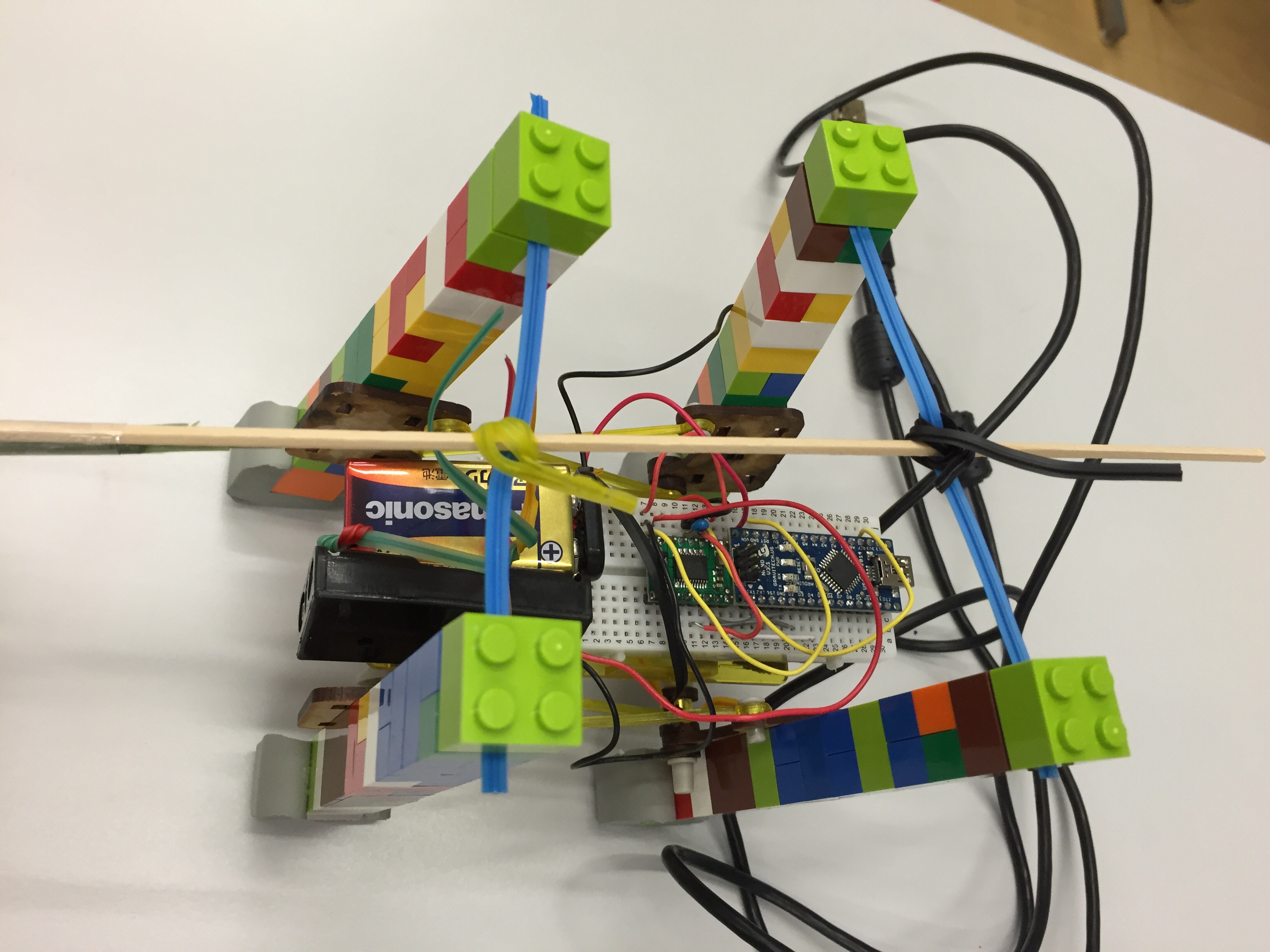
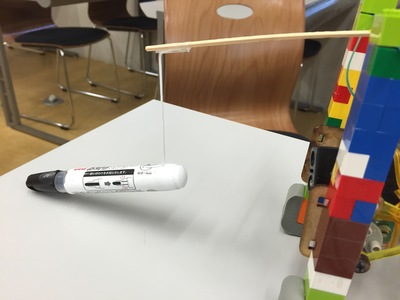
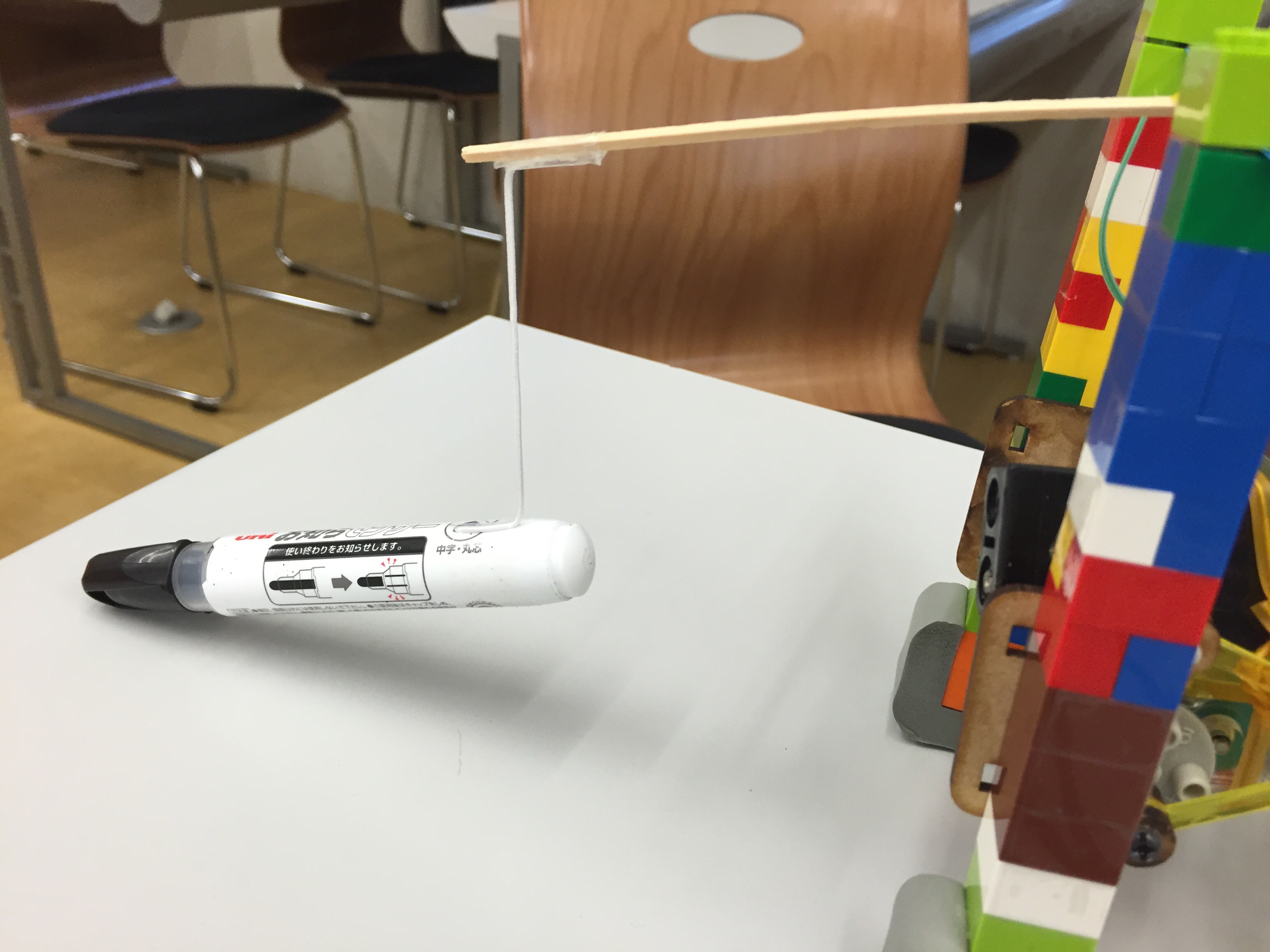
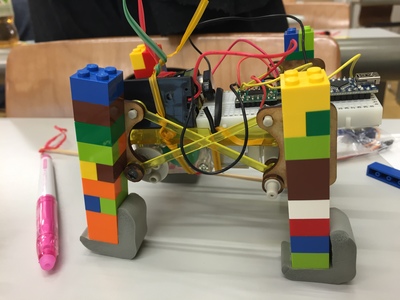
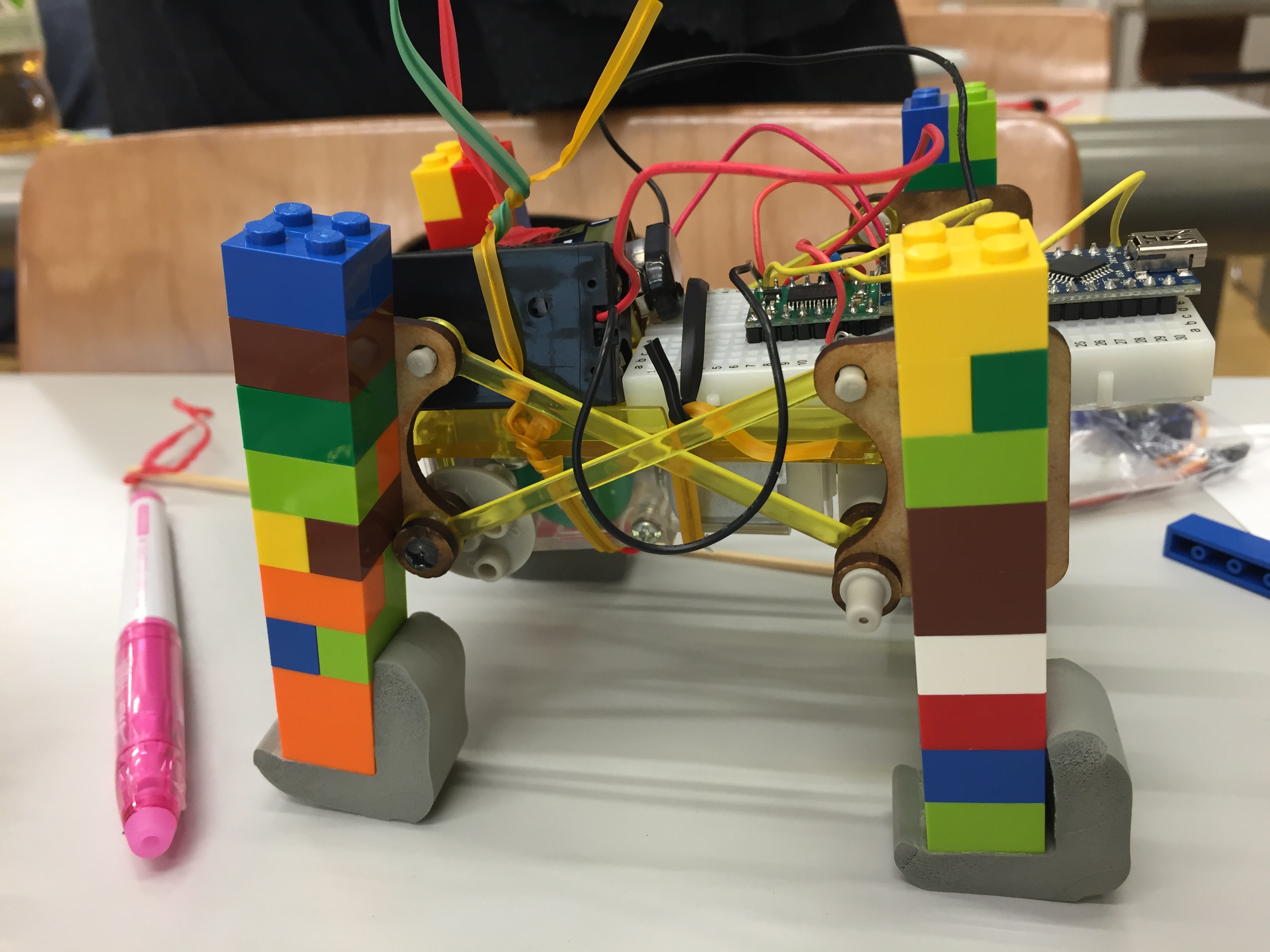
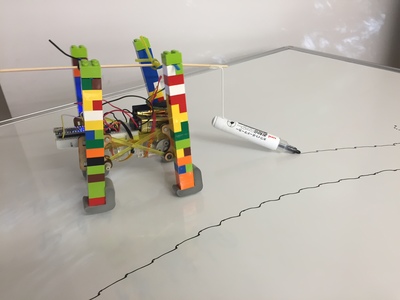
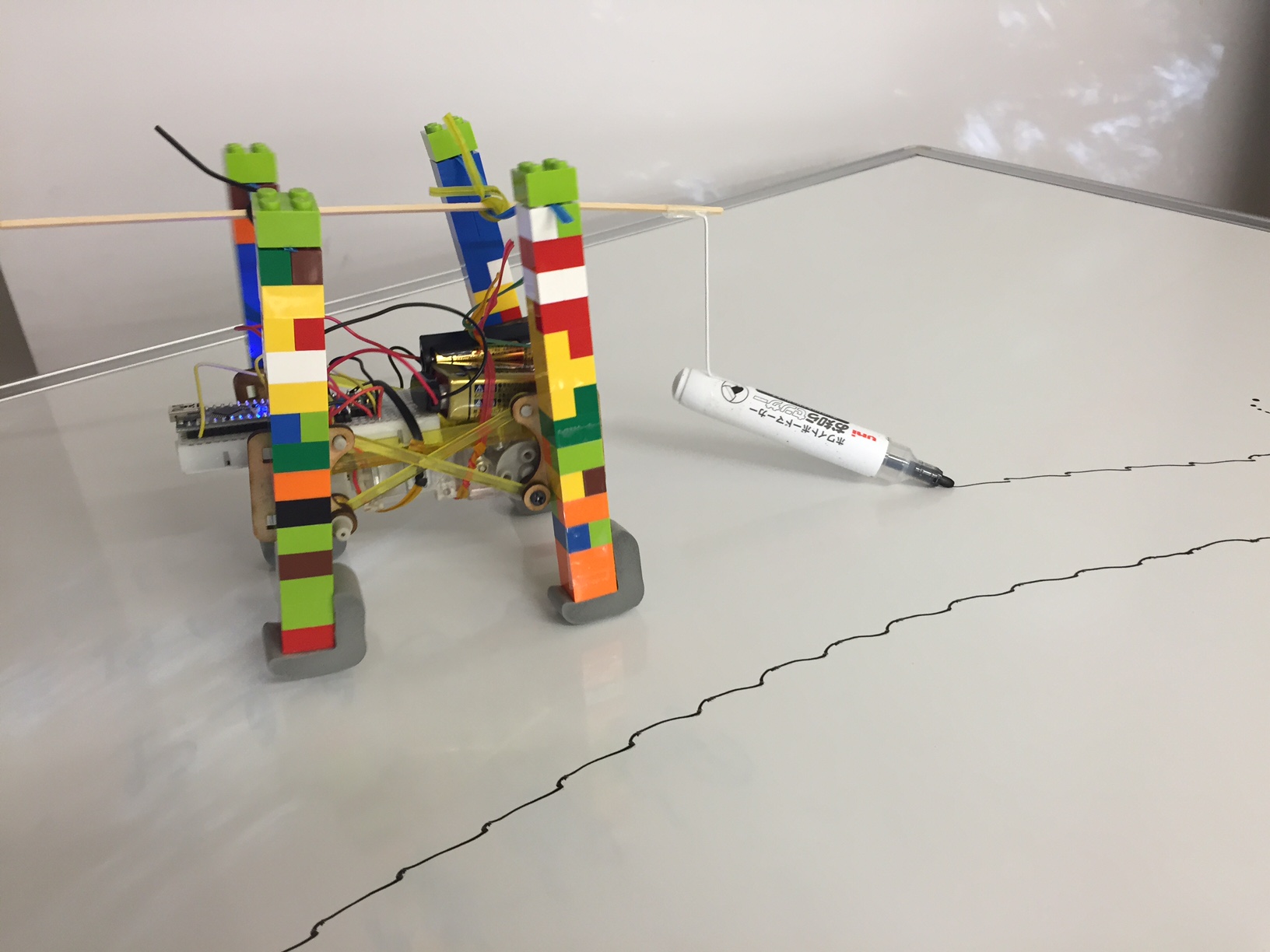
ロボットの足をつくる0ロボットの足として、レゴブロックを用いる。レゴブロックを組み立て、足となる部分の高さを揃える。レゴブロックを脚につける0足パーツに両面テープで、レゴブロックを接着する。(接着力が強いほうが良いと思います)レゴブロックの足にコーナークッションを取り付ける0歩行の安定性向上のため、両面テープ等でレゴブロックの足にコーナークッションを取り付ける。ブロックの側面をテープで強化0歩かせてみると動きでブロックが外れたため応急処置としてテープで固定した。ロボットの足の頂点に竹串を通す0頂点から1つ下の段のレゴブロックと頂点のレゴブロックの間に針金を通し、写真のような形で竹串を通す。描画するための"しっぽ"をつける0描画に必要な"しっぽ"(今回はホワイトボードマーカー)を、竹串の先からヒモで吊るす。Add Annotation Order
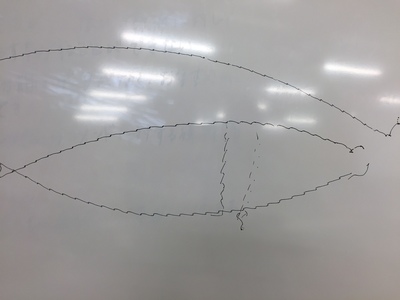
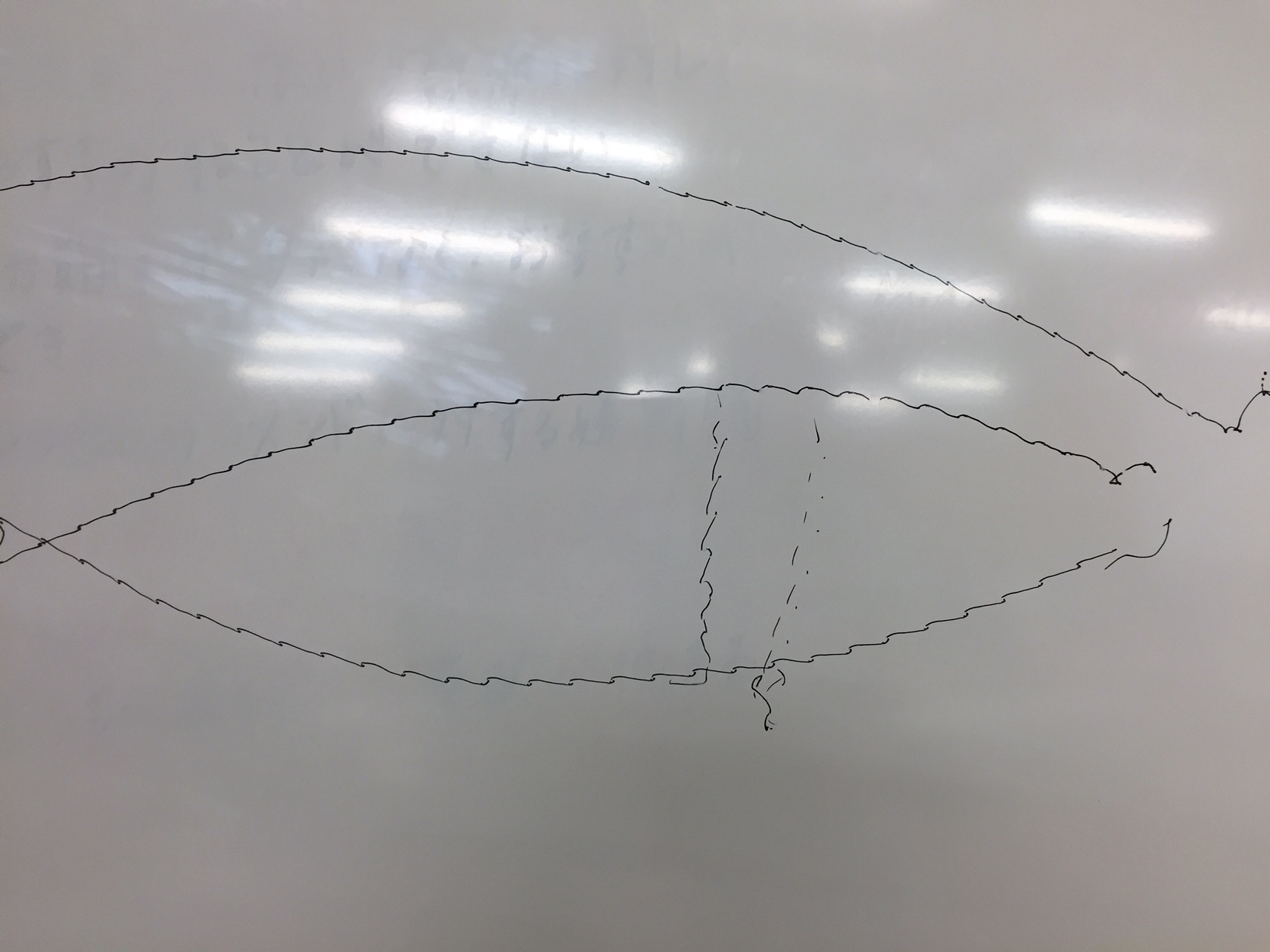
完成0歩行のためのプログラムやレゴブロックの拡張方法などを変更すると面白くなります!絵を描かせてみる。0ホワイトボードの盤面においてマーカーで歩かせてみると規則性のある線を描くことが出来た。左方向に曲がるようで、目のような絵を描かせた。Add Annotation Order





Comments