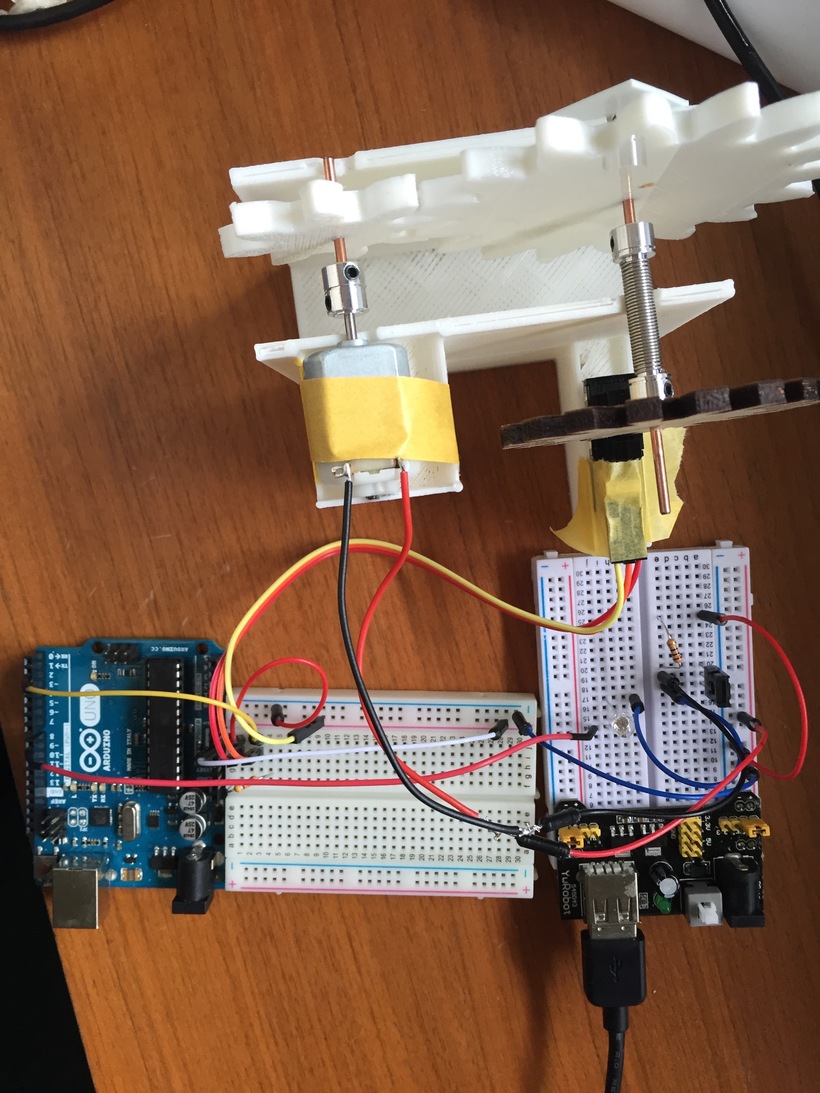

前回のゴミ箱を開けるロボットは、正転・反転をdelayを使って時間で見ているだけであり、特にモーターの位置を見ているわけではなかった。結果、実際にゴミ箱のフタを開けるような場面では開ける方は余り開かず、戻す方だけ勢い良く戻ってしまいどんどん腕が前に来てしまうという問題があり、それをdelayの値を調整することで無理やり解決していた。

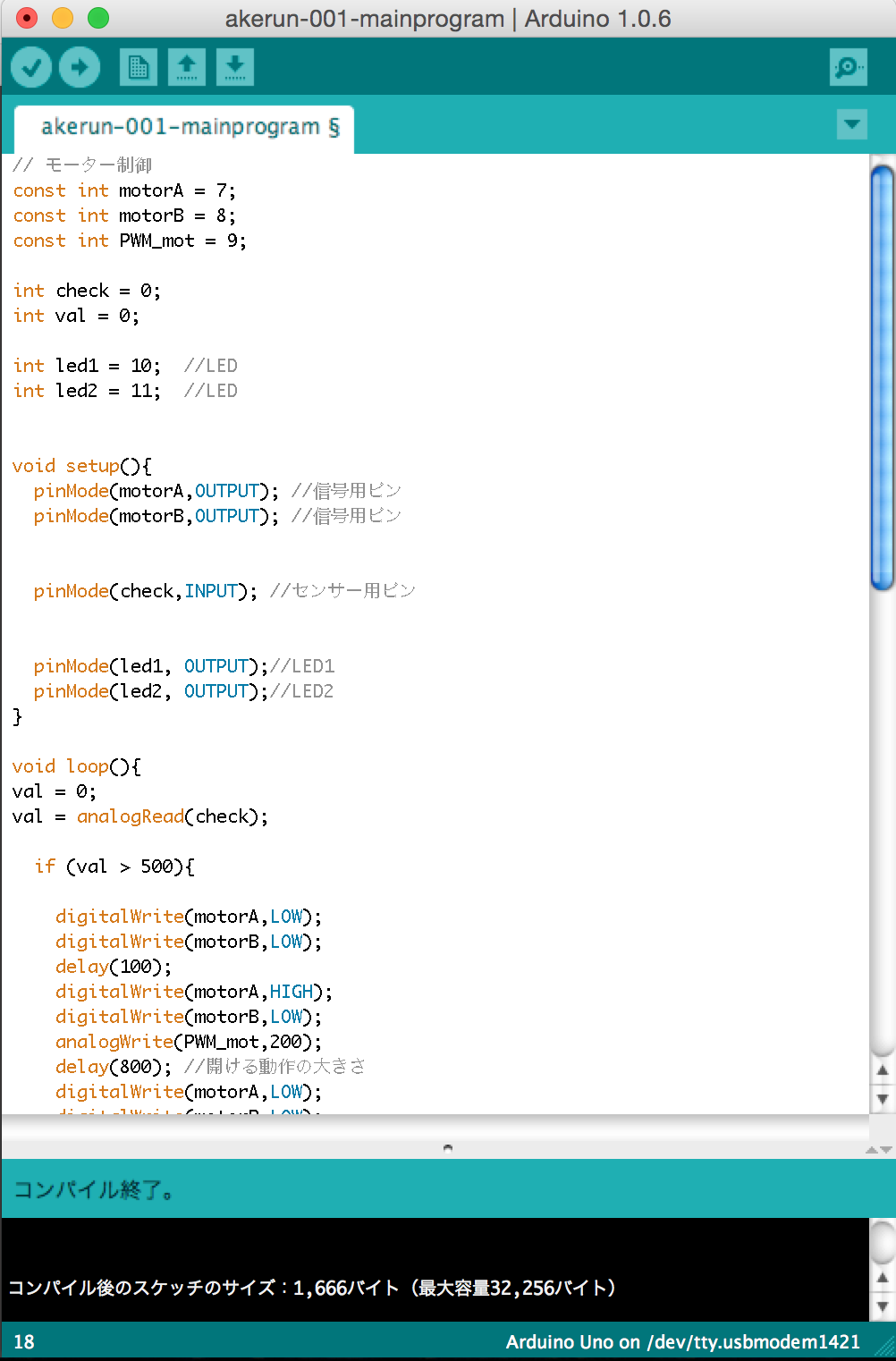
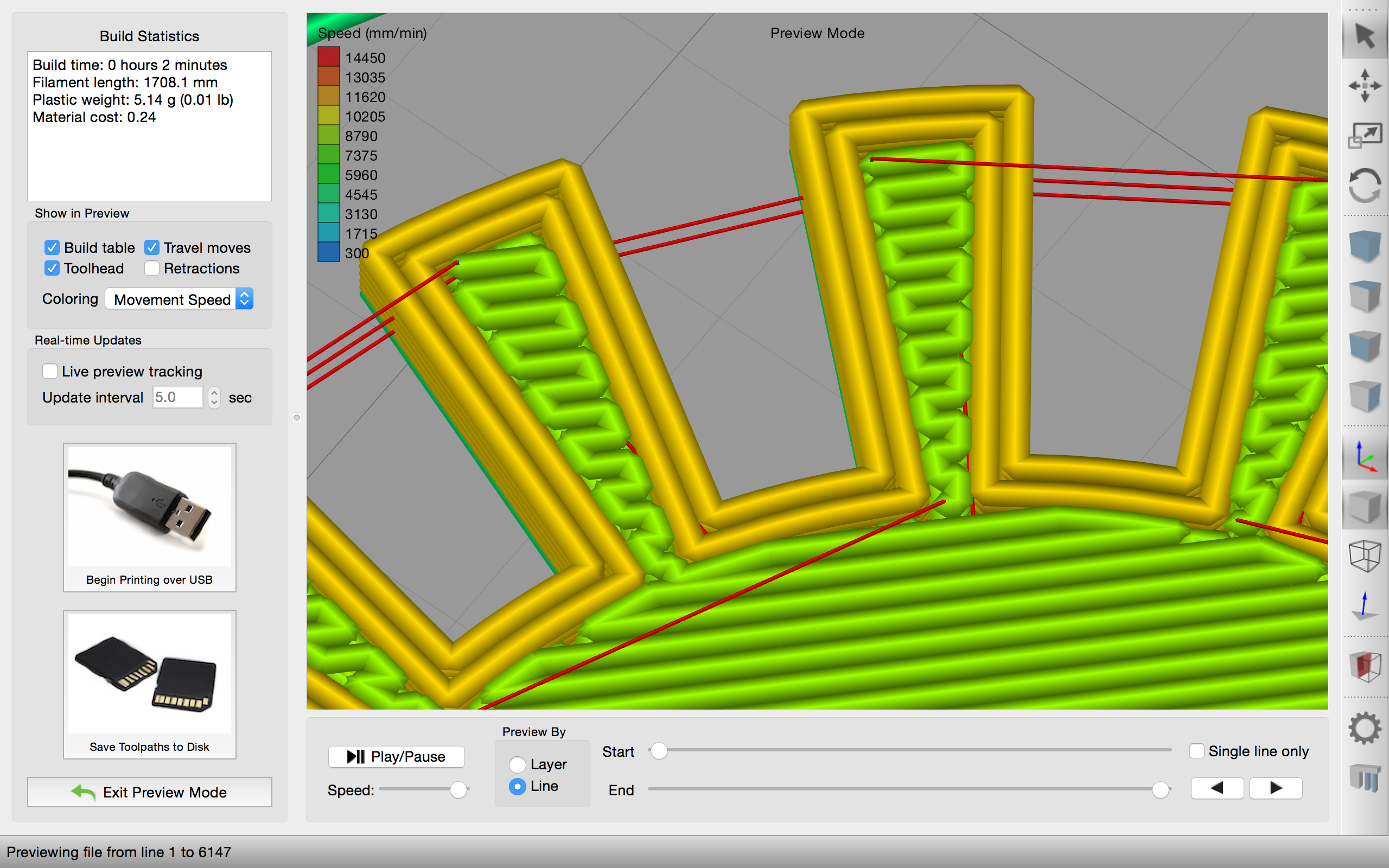
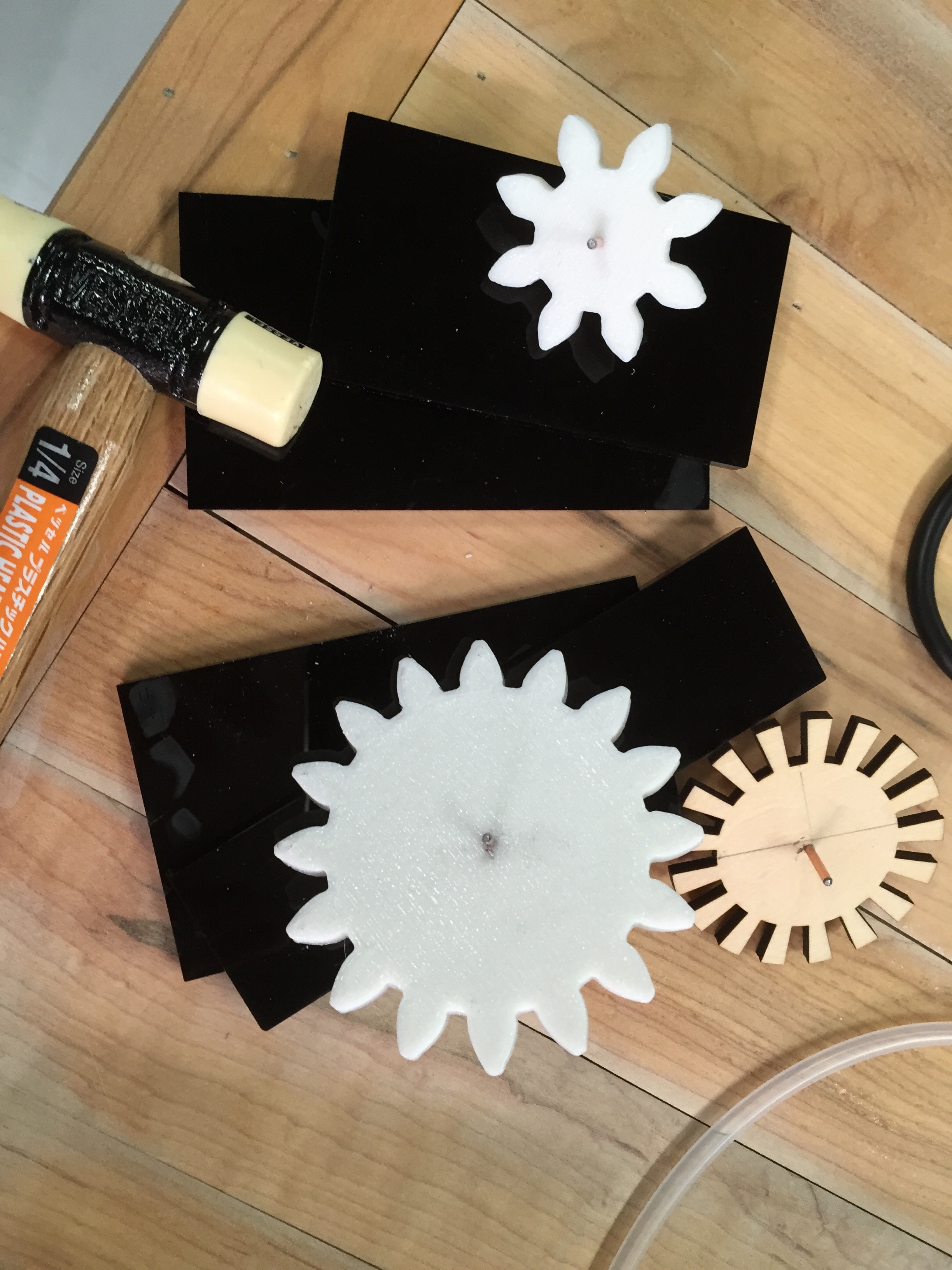
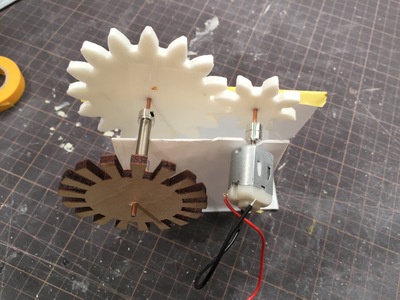
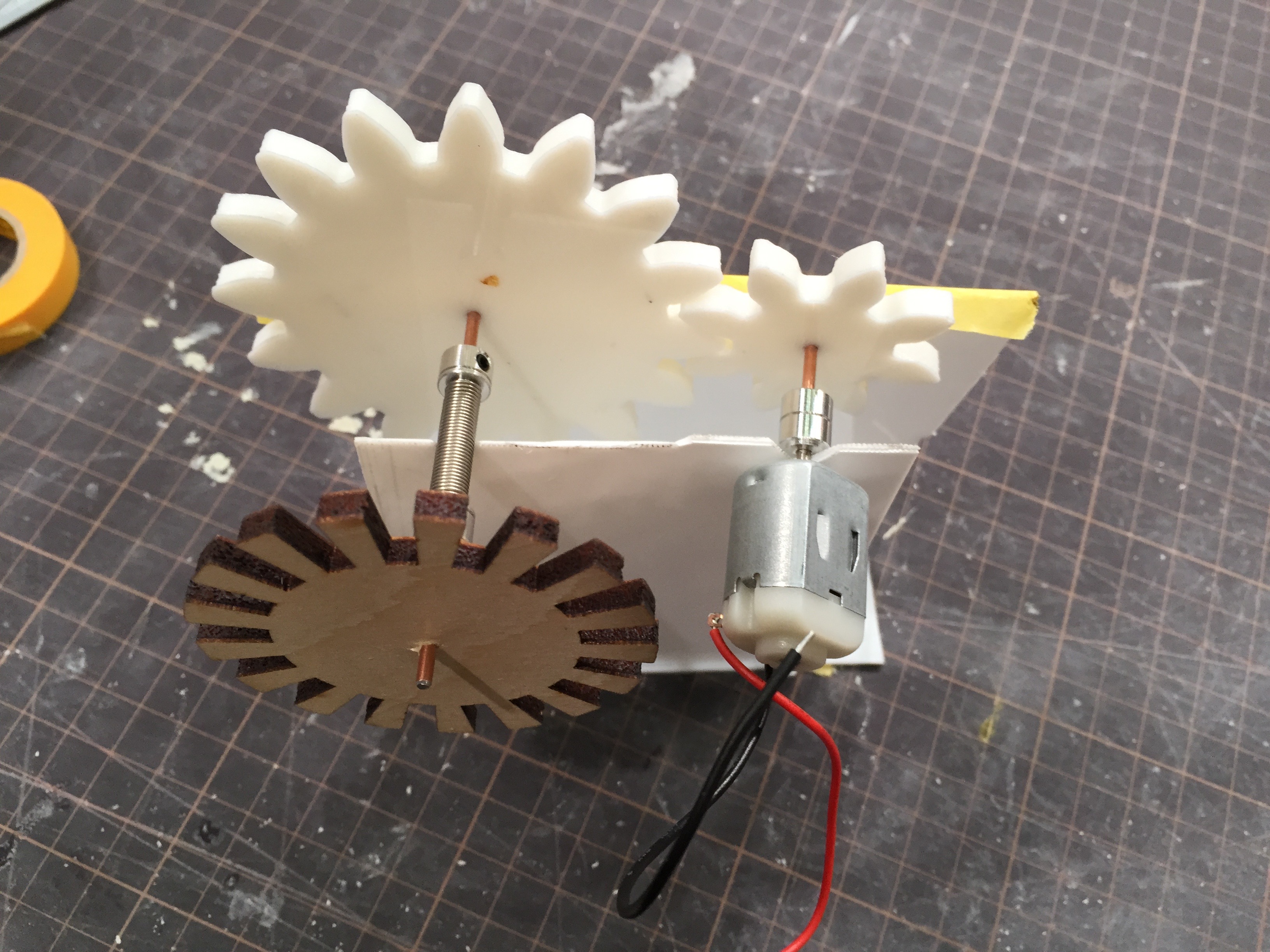
- 前回でモーターの制御をしたつもりになっていたが、理系に行った友人にそもそもフィードバックを伴わないものは制御でも何でもなくただ動かしただけだと注意され、フィードバック制御の基礎という授業のテキストを貸してくれることになった。そこで今回はロータリーエンコーダの仕組みを理解するため、自分で作ってみることにした。


Comments