

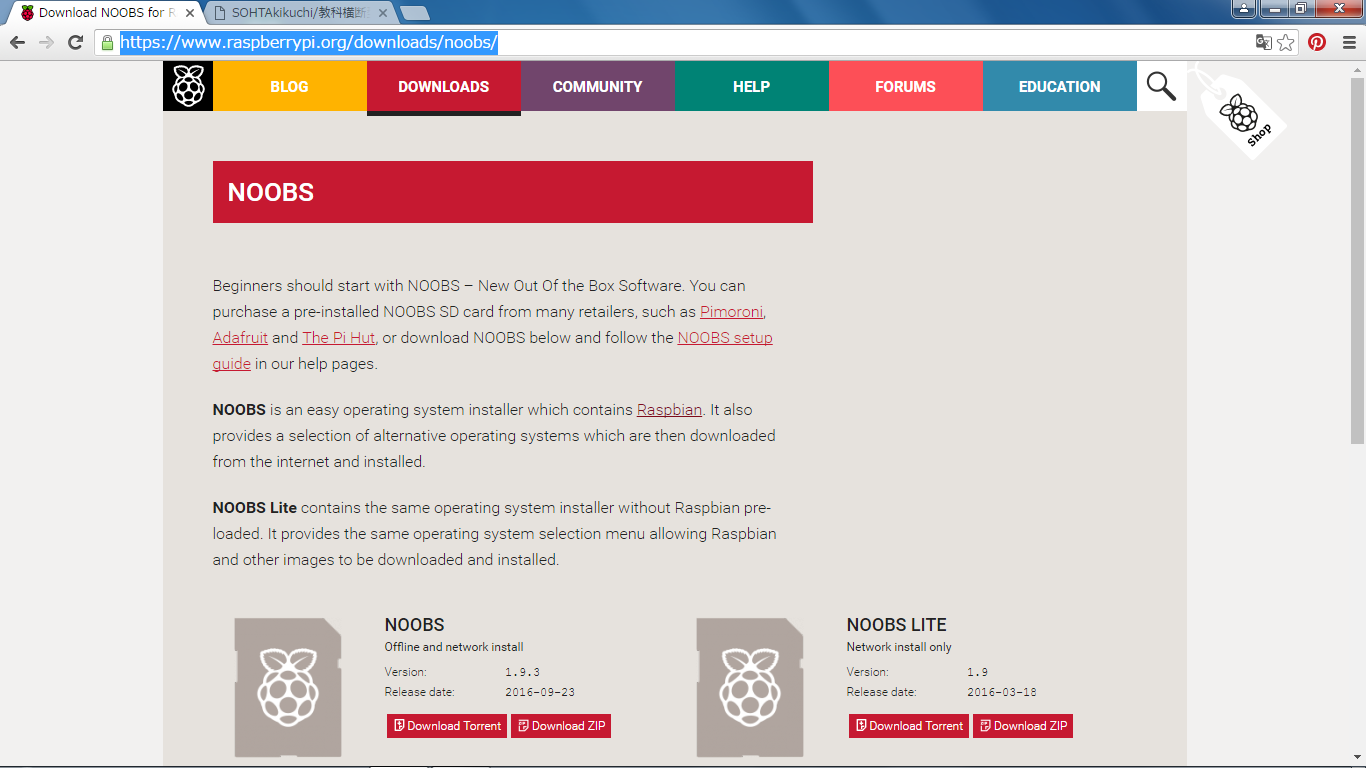
下記のページからArduinoをインストールします。
https://www.arduino.cc/en/Main/Software

- パソコンの環境に合わせた,JUSTDOWNROADを選択するとダウンロードが開始されます。
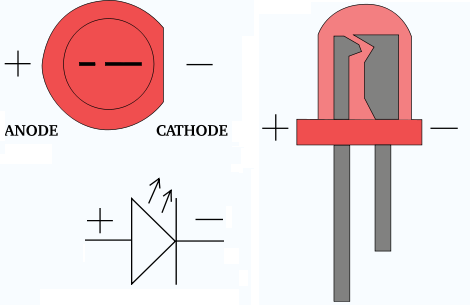
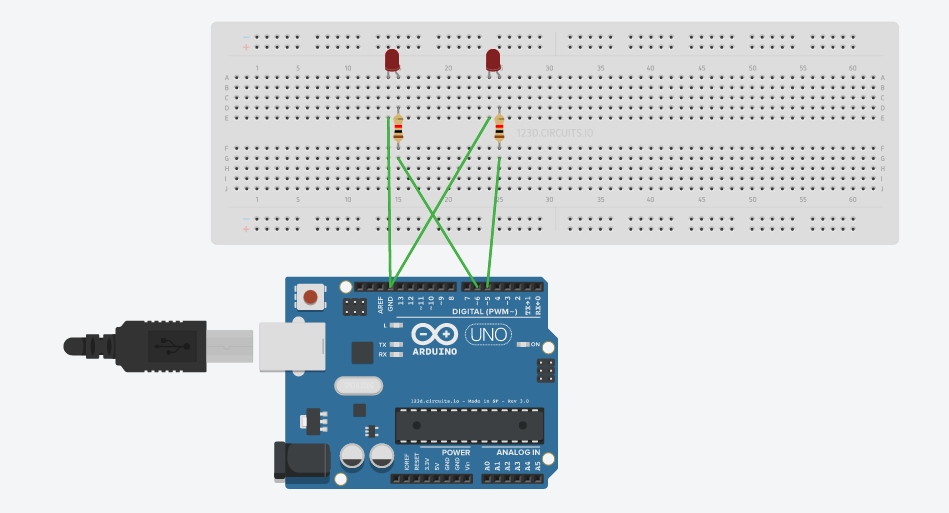
LED
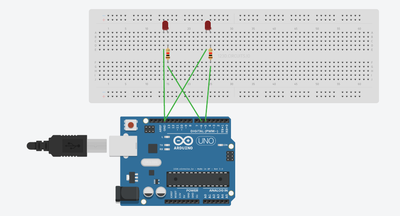
0 アノードとカソードを見分け,アノードに+(ピンの番号),カソードにー(グラウンド)をさす。
アノードとカソードを見分け,アノードに+(ピンの番号),カソードにー(グラウンド)をさす。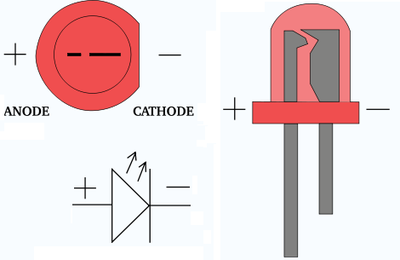
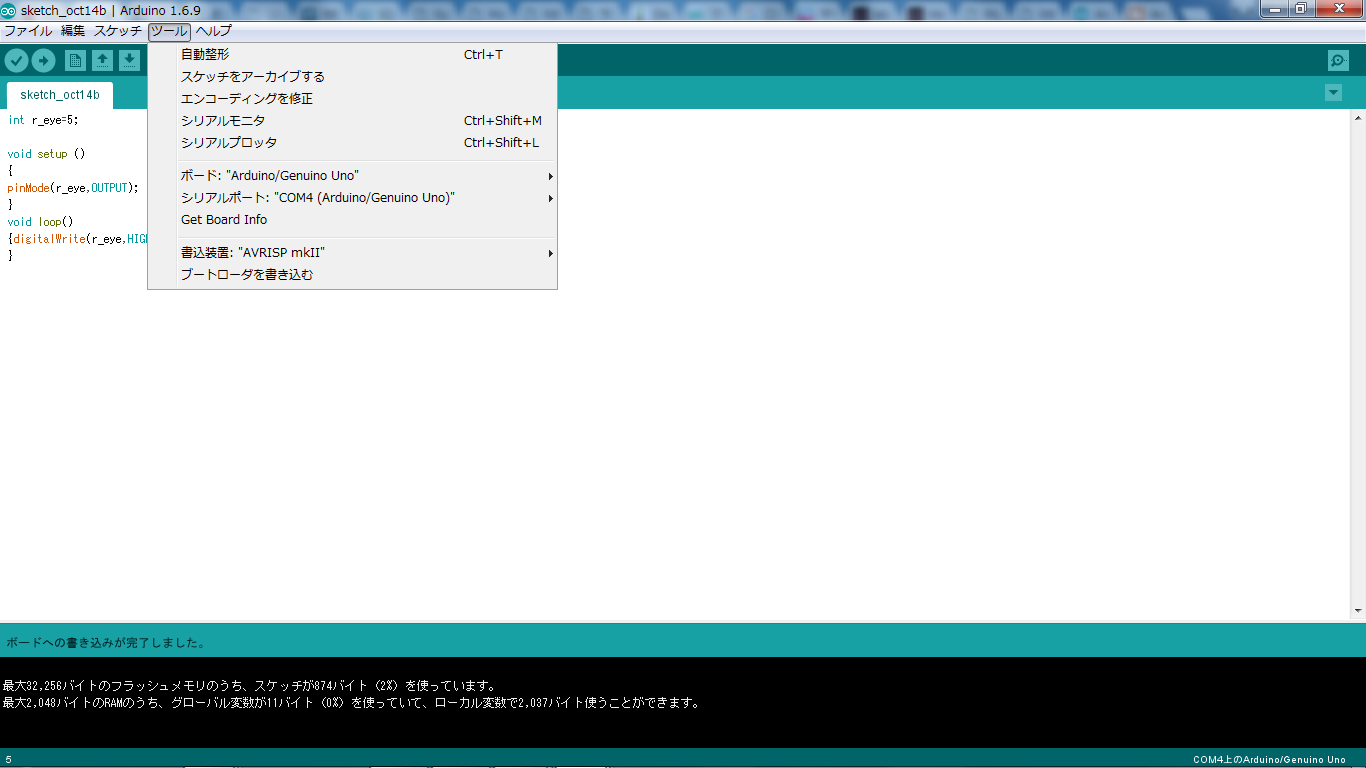
- ボードの種類,シリアルポートをツールから確認し,プログラムを打ち込む.プログラムが出来たら「→」でマイコンボードに書き込む.int r_eye=5;void setup (){pinMode(r_eye,OUTPUT);}void loop(){digitalWrite(r_eye,HIGH);}

Comments