kanpapaのメモposted by kanpapa on March 14, 2015モーターのAPI/api/motor/right?speed=[-255〜255]/api/motor/left?speed=[-255〜255]TOCOSから返って来るデータ無線強度は0-255ジャイロセンサーの情報…
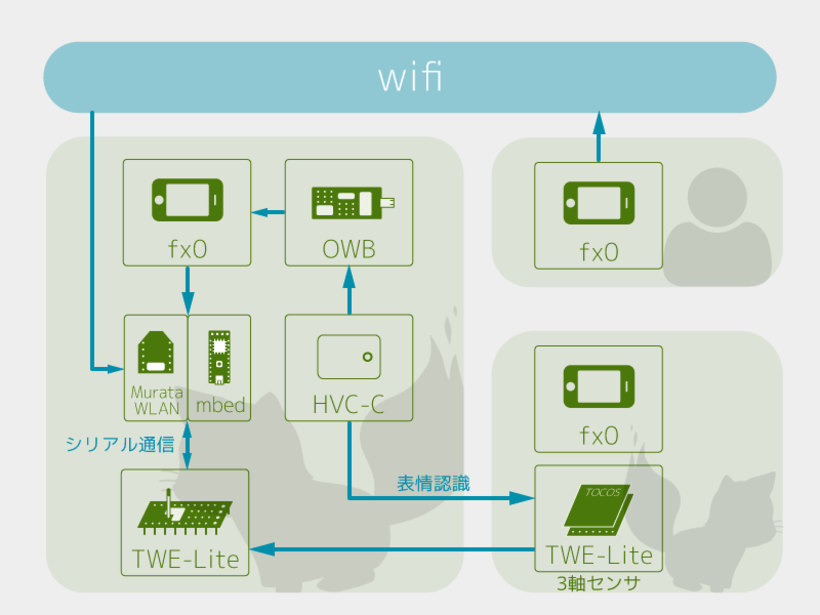
TOCOSとmbedの通信テストposted by kanpapa on March 15, 2015mbedでWebサーバを走らせる。TOCOSからはシリアルで受ける。TOCOSからのシリアル割り込みでデータをバッファしてAPIコール時にそれを返す。
TOCOSの設定posted by kanpapa on March 15, 2015ファームウェアの書きかえWindows用のプログラムがある。書き換え後の設定方法専用基板でUSBシリアルに接続。+++回で設定モードに。oを21にすると読みやすいモードにSで保存。
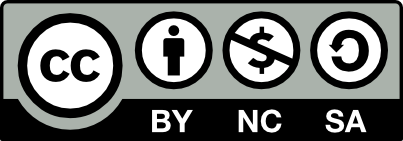
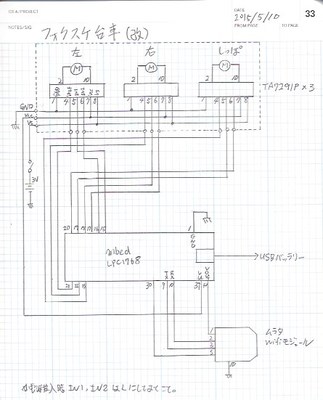
反省点posted by kanpapa on March 15, 2015本番でモーターが動かなかった点を踏まえて改善策。原因:動かなかった原因はバッテリー電圧の低下対策案各機器の最大電流を確認し、最適な電源(バッテリー)を選択。デジタル回路と動力回路の電源を分離する。デジタル回路の動作は死守。モーターの突入電流に注意。バッテリーや基板を保持するためにカゴは最善の選択。…
電源周りを見直すposted by kanpapa on March 16, 2015ムラタ 無線LANモジュール Type YDの消費電力IEEE802.11btyp 365mA max 440mAIEEE802.11g typ 280mA max 360mAIEEE802.11n typ…
Public padの内容posted by kanpapa on March 22, 2015Fabblehttp://fabble.cc/kanpapa/lovelove-foxkeh-team10イベントページhttp://au-fx.kddi.com/event/20150314/wot_hackathon0314.htmlフォクすけの顔とリモコンアプリのリポジトリ (Fx0 用)…
INTERFACEposted by kanpapa on March 22, 2015INTERFACEフォクすけ Fx0 httpd.js server <= コントローラ Fx0操作系 API (全部 GET リクエスト)mortor/api/motor/right?speed=[-255〜255]/api/motor/left?speed=[-255〜255]face…
mbed系のメモposted by kanpapa on March 22, 2015デバック用としてmainに入れるDigitalOut led2(LED2);デバックはprintf()で。GETで/api/tocosとすると、TOCOSから受信した最新のデータを返す。TOCOSから受信するデータの仕様…
テスト環境のIP情報posted by kanpapa on March 22, 2015端末IPdynamis Fx0 @ KDDI_hackathon04http://192.168.100.109:3000/api/heartbeatdynamis Fx0 @ Team10http://192.168.43.129:3000/api/heartbeat192.168.43.129彼女フォクすけ Fx0…
モーターAPIの変更posted by kanpapa on May 10, 2015電源分離後に動作テストをしたところ、なぜかRightのモータしかmoveされていませんでした。mbedのhttpサーバーに対して、コントローラからright、leftと続けてGETをしていますが、mbedでleftのGETを取りこぼしているようです。このためコントローラーの動きと連動しなかったのでしょう。…