Searched Projects: 7
- 1班|小原 亘、小島 凌汰、森田 健人<br/> FabWalkerは、上手に「歩く」という方法を考えるロボットキットプロジェクトです。ロボット単体では動きませんが、胴体部分に、足となる素材を組み合わせることで歩き出します。用いる素材は、ロボットとはちょっと結びつかないような木など自然物やペンなど身の回りにある素材などアイデアの数だけあり、素材次第で歩き方が変わったり、ドローイングボットや...6 Steps /6 Memossince 3551 days ago
 2
2 - 5 Steps /0 Memossince 3323 days ago0
- [member] 森田 健人 佐内 賢治 金田 ゆりあ 廣多 岳6 Steps /0 Memossince 3323 days ago0
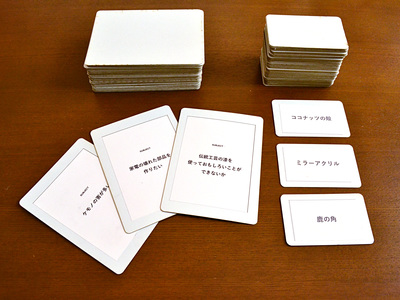
- 「Fabricard(ファブリカード)」はFJN2015:日本ファブラボ会議 FabCampにて行われた「Fablabを作るゲーム」を作るワークショップで作られたカードゲームです。ここではこのゲームを作って遊ぶ方法を説明します。 このゲームでは日本全国のファブラボに実際に寄せられた相談事に、マテリアルとファブラボにある機材 、そしてアイデアを駆使して挑むことで、ものづくりの可能性やいろ...4 Steps /0 Memossince 3409 days ago1
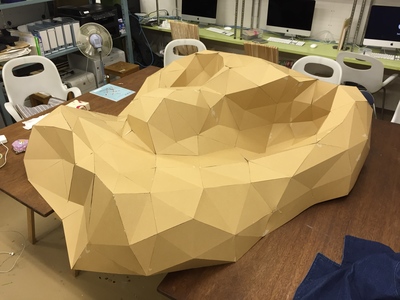
- 宮城大学メディアデザイン演習C(3年後期)課題。フィジカル作業とデジタル作業を一貫して行う。現実への実装能力こそが実はメディアデザインを支えている、というポリシーのもとに実施。 DGMとは”大(D), 顔(G), 面(M)”の意。 粘土で造形、スキャンしてポリゴンと格闘、最後はダンボールで1,500mmの大顔面を作る課題。 ポリゴン数の多いデータは組み立てるのが大変だが、 少なすぎて...7 Steps /0 Memossince 3435 days ago3
- タケ(竹)+オーニソプター(羽ばたき飛行機)=タケソプター! 3Dプリンターで出力したパーツと竹ひごを組み合わせてゴム動力の羽ばたき飛行機を作ります。 少ない部品数なので簡単に組み立てられ、工作ワークショップアイテムにも向いています。7 Steps /3 Memossince 3665 days ago14
- 九州大学芸術工学部の授業でアタリパンクコンソールを作るための説明書及び議事録。6 Steps /4 Memossince 3529 days ago3
- walkingtreeは自然から最適な木の枝や植物を採取し胴体とすることで,歩く植物とする自立型ロボット玩具である.上部の植木鉢に採取した植物や木の枝を植え,体験者の想像した歩行植物ロボットとして完成する. 完成後は,自立したロボットとして動き始める.太陽光の当たる場所に辿り着くと,動力のモーターはソーラー充電器により蓄電され,上部に植えられた植物は光合成を行う.太陽光エネルギーによって光...11 Steps /0 Memossince 3551 days ago0
- FabWalkerは、上手に「歩く」という方法を考えるロボットキットプロジェクトです。ロボット単体では動きませんが、胴体部分に、足となる素材を組み合わせることで歩き出します。用いる素材は、ロボットとはちょっと結びつかないような木など自然物やペンなど身の回りにある素材などアイデアの数だけあり、素材次第で歩き方が変わったり、ドローイングボットや運搬ロボットに変化します。ひとつのロボットがいろいろ...8 Steps /1 Memossince 3551 days ago12
- walkingtreeは自然から最適な木の枝や植物を採取し胴体とすることで,歩く植物とする自立型ロボット玩具である.上部の植木鉢に採取した植物や木の枝を植え,体験者の想像した歩行植物ロボットとして完成する. 完成後は,自立したロボットとして動き始める.太陽光の当たる場所に辿り着くと,動力のモーターはソーラー充電器により蓄電され,上部に植えられた植物は光合成を行う.太陽光エネルギーによって光...11 Steps /0 Memossince 3551 days ago0
- WalkingTreeは自然から最適な木の枝や植物を採取し胴体とすることで,歩く植物とする自立型ロボット玩具である.上部の植木鉢に採取した植物や木の枝を植え,体験者の想像した歩行植物ロボットとして完成する. 完成後は,自立したロボットとして動き始める.太陽光の当たる場所に辿り着くと,動力のモーターはソーラー充電器により蓄電され,上部に植えられた植物は光合成を行う.太陽光エネルギーによって光...11 Steps /0 Memossince 3551 days ago0
- Woodpecker AP1212Yの使い方を説明します。 このドキュメントはハードウェアの使い方になります。データ製作は[How to use "Type3"]で説明をしています。 この機材はFablab Kitakagayaで使用できます。 (注)この機材は「人が死ねる機材」です(腕を切断するなど)。 安全第一で使用しましょう。31 Steps /3 Memossince 3596 days ago3



Tags & Keywords