Searched Projects: A1
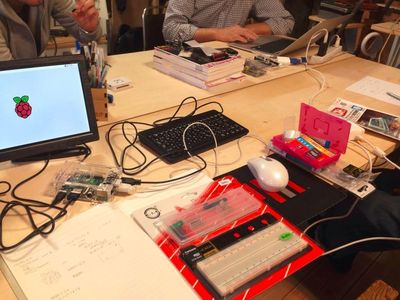
- Spheroを、Windows+node.js+bluetoothで動かします。 node.jsのインストールから、bluetoothでの接続、プログラムの実行までです。4 Steps /0 Memossince 3723 days ago
 2
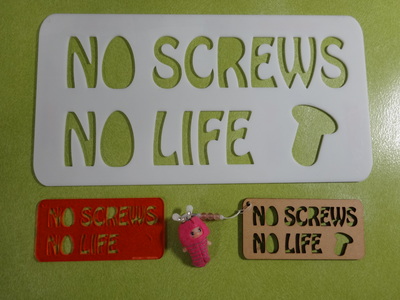
2 - ねじが大好きな私は「ねじがなければ生きてゆけない」というこの言葉をレーザー加工機に刻みました。1 Steps /0 Memossince 3707 days ago0
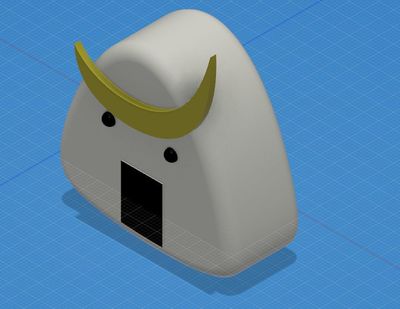
- FabLab Kannaiで話題の3DCADであるFUSION360の勉強会をしました。初心者に基礎のきそから約2時間。難しいところもあったと思いますが、皆さん真剣に、かつ楽しみながら取り組んでもらえました。写真は最後の課題で出題した仙台の観光PRキャラクターむずび丸を模したモデリング例です。0 Steps /0 Memossince 3885 days ago0
- WalkingTreeは自然から最適な木の枝や植物を採取し胴体とすることで,歩く植物とする自立型ロボット玩具である.上部の植木鉢に採取した植物や木の枝を植え,体験者の想像した歩行植物ロボットとして完成する. 完成後は,自立したロボットとして動き始める.太陽光の当たる場所に辿り着くと,動力のモーターはソーラー充電器により蓄電され,上部に植えられた植物は光合成を行う.太陽光エネルギーによって光...11 Steps /0 Memossince 3905 days ago0
- walkingtreeは自然から最適な木の枝や植物を採取し胴体とすることで,歩く植物とする自立型ロボット玩具である.上部の植木鉢に採取した植物や木の枝を植え,体験者の想像した歩行植物ロボットとして完成する. 完成後は,自立したロボットとして動き始める.太陽光の当たる場所に辿り着くと,動力のモーターはソーラー充電器により蓄電され,上部に植えられた植物は光合成を行う.太陽光エネルギーによって光...11 Steps /0 Memossince 3905 days ago0
- walkingtreeは自然から最適な木の枝や植物を採取し胴体とすることで,歩く植物とする自立型ロボット玩具である.上部の植木鉢に採取した植物や木の枝を植え,体験者の想像した歩行植物ロボットとして完成する. 完成後は,自立したロボットとして動き始める.太陽光の当たる場所に辿り着くと,動力のモーターはソーラー充電器により蓄電され,上部に植えられた植物は光合成を行う.太陽光エネルギーによって光...11 Steps /0 Memossince 3904 days ago0
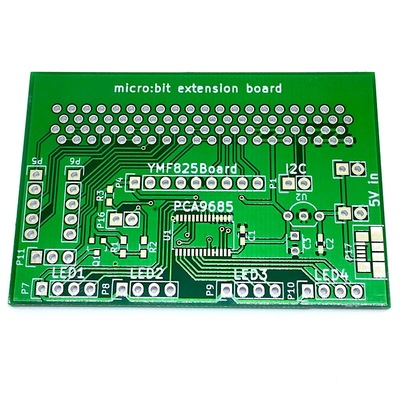
- micro:bit extension boardは、micro:bitと接続してフルカラーLEDを制御したり、ヤマハのFM音源YMF825から音を鳴らすための拡張ボードです。この拡張ボードの実装方法と、使い方について紹介します。3 Steps /0 Memossince 2970 days ago0
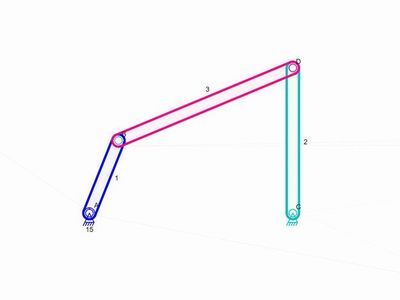
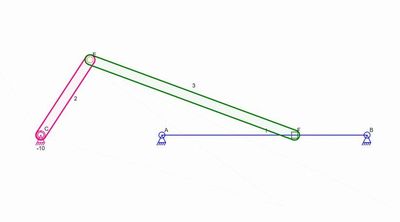
- Linkage Mechanism Designer and Simulatorでてこクランク機構を作成してみます。6 Steps /0 Memossince 3001 days ago0
- リンク機構などのシミュレーションができるLinkage Mechanism Designer and Simulatorを使ってみたいと思います。17 Steps /0 Memossince 3013 days ago0


Tags & Keywords